モジュール式ソースメジャーユニット (SMU) による計測で検討すべき重要事項
概要
I-V境界、精度、ソースと計測の確度、計測速度、ソース更新レート、過渡応答などの主要な機能に基づいて、ソースメジャーユニット (SMU) を選択する方法について説明します。
内容
- I-V境界
- 精度
- ソースと計測確度
- 計測速度
- ソースのアップデートレート
- 過渡応答
- シーケンスまたはスイープ
- パルス生成
- チャンネル密度
- タイミングと同期
- ソフトウェア、解析機能、カスタマイズ性
- 高精度計測のための接続
- 次のステップへ
I-V境界
アプリケーションを成功させるには、デバイスに適切なI-V境界を持つソースメジャーユニット (SMU) を使用することが重要です。通常、I-V境界は図1のような4象限図で示され、SMUによるソースまたはシンクが可能な電圧と電流の値が表されます。ソース、シンクという用語は、デバイスへの、またはデバイスからの電力の流れを表します。ソース電源となるデバイスは負荷に電力を提供します。また、シンク電源となるデバイスは負荷のように動作し、駆動する電力を取り込んで電流の帰還経路を提供します。
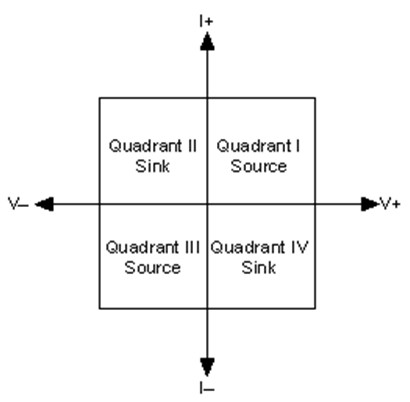
図1.ソースとシンクの範囲を表す4象限図
図1の4象限図において、第一象限と第三象限はソース電力、第二象限と第四象限はシンク電力を表します。第一象限および第三象限で電力を供給できるデバイスは、正および負の電圧/電流を生成することができるため、バイポーラとも呼ばれています。また「4象限SMU」という用語は、多くの場合、ソースとシンクが行えるバイポーラSMUのことを指して用いられます。
4象限SMUの代表的な例にNI PXI-4132があります。その最大出力電圧は100 V、最大出力電流は100 mAです。ただし、100 Vと100 mAを同時に出力することはできません。このような場合に、4象限図が重要な詳細情報を示すものとなります。4象限図を参照すれば、SMUでソース/シンクが可能な最大電圧と最大電流の組み合わせを簡単に把握できます。複数のレンジを備えるSMUの場合、単に最大電圧と最大電流の値を示すだけでは、対象とするデバイスのI-V要件を満たすかどうかを判断するための情報としては不十分なのです。
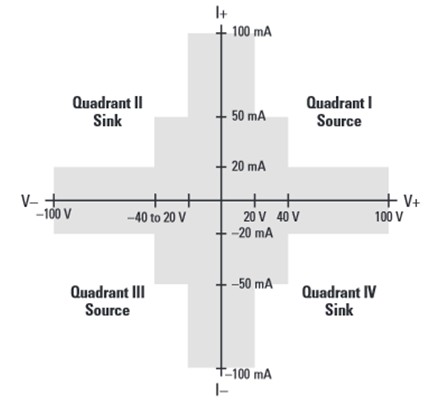
図2.NI PXI-4132のI-V境界
表1は、NIの各電源/SMU製品について、チャンネル当たりの電力性能をまとめたものです。
| デバイス | チャンネル | 象限 | |||
| I | II | III | IV | ||
| NI PXI-4110 | 0 | 6 W | — | — | — |
| 1 | 20 W | — | — | — | |
| 2 | — | — | 20 W | — | |
| NI PXIe-4112 | 0および1 | 60 W | — | — | — |
| NI PXIe-4113 | 0および1 | 60 W | — | — | — |
| NI PXI | 0 | 6 W | — | — | — |
| 1 | 40 W | 10 W1 | 40 W | 10 W1 | |
| NI PXI-4132 | 0 | 2 W | 2 W | 2 W | 2 W |
| NI PXI-4138/4139 | 0 | 20 W | 12 W1 | 20 W | 12 W1 |
| NI PXIe-4140/4141 | 0~3 | 1 W | 1 W | 1 W | 1 W |
| NI PXIe-4142/4143 | 0~3 | 3.6 W | 3.6 W1 | 3.6 W | 3.6 W1 |
| NI PXIe-4144/4145 | 0~3 | 3 W | 3 W1 | 3 W | 3 W1 |
| NI PXIe-4154 | 0 | 18 W1 | — | — | 18 W |
| 1 | 12 W1 | — | — | 0.8 W1 | |
| 1詳細なI-V境界については、各製品の仕様を参照のこと。 | |||||
表1.NI計測器ポートフォリオのチャンネルあたりの電力性能一覧
精度
電源またはSMUの計測分解能は、ハードウェアで検出可能な電圧または電流計測における最小の変化です。電源またはSMUの出力チャンネルの出力分解能は、出力電圧または電流レベルに対して設定できる最小の変化です。これらの計測値は通常、nVやpAなどの絶対単位で指定されます。多くの場合、分解能は計測に使用するアナログデジタルコンバータ (ADC) によって制限されますが、高精度SMUは通常、ノイズなどの他の要因によって制限されます。
感度は、特定の条件下で使用されている計測器において、検出可能な最小単位のパラメータです。この単位は通常、電源またはSMUの最小レンジにおける計測分解能と同じです。
通常、最大の精度を得るにはSMUの最小レンジを使用する必要があります。この情報については、その計測器の仕様書に記載されています。仕様書に記載されている表の例を表2に示します。
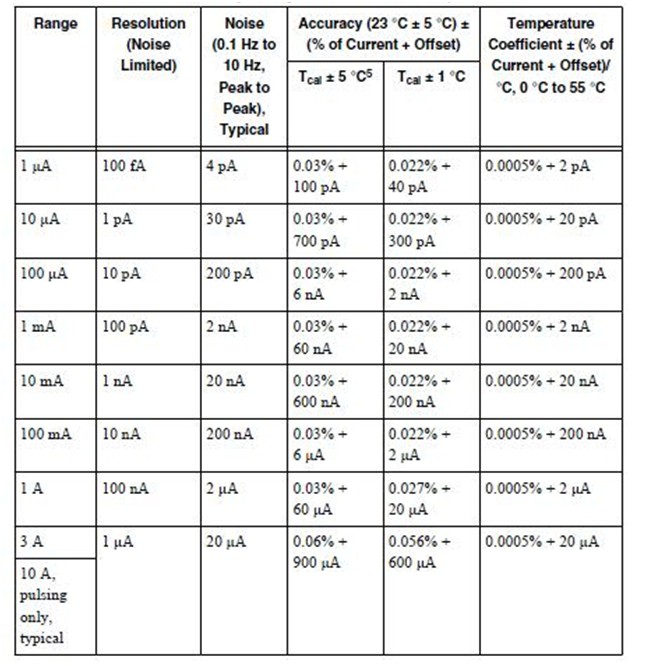
表2.NI PXIe-4139の電流プログラミング、計測確度/分解能
ソースと計測確度
電源またはSMUでの計測/出力レベルは、実際の値もしくは要求値と異なる可能性があります。確度は特定の計測/出力レベルでの不確実さを表し、以下のように、伝達関数からの偏差として定義されます。
y = mx +b
ここで、m = システムの理想ゲイン
x = システムへの入力値
b = システムのオフセット
y = システムからの出力値
この例を電源またはSMUの信号計測に適用した場合、yはxを入力とするデバイスから取得した読み取り値で、bは計測を開始する前にゼロに戻すことができるオフセット誤差です。mが1でbが0の場合、出力計測値は入力値と等しくなります。一方、mが1.0001の場合、理想値からの誤差は0.01%ということになります。
大半の高分解能、高確度の電源またはSMUでは、確度はオフセット誤差とゲイン誤差の組み合わせとして表されます。これらの2つの誤差が追加されて、特定の計測における全体の確度仕様が決定されます。NIの電源およびSMUは通常、絶対単位 (mVまたはμAなど) でオフセット誤差を指定します。また、ゲイン誤差は読み取り値もしくは要求値のパーセントで表されます。
一般にSMUのソース供給および計測の確度は、設定出力の0.1%以下です。NIの各SMU計測器に関するこの情報は、仕様書に記載されています。
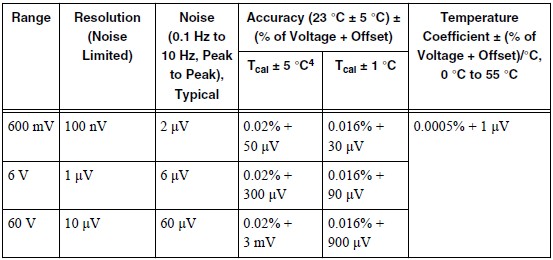
表3.NI PXIe-4139の電圧プログラミング、計測確度/分解能
計測速度
計測値の収集に使うウィンドウ、つまりアパーチャ時間は、計測の速度と精度に直接影響を及ぼします。一部のSMUでは、この計測用のアパーチャ時間を変更できるようになっています。この機能を利用すれば、高精度の計測を行うために収集用のウィンドウを拡大したり、高速な収集を行うためにウィンドウを縮小したりといったことが柔軟に行えます。アパーチャ時間を長くすると、計測時にサンプルの収集と平均化を行うための時間を長く確保でき、計測ノイズが低下して分解能が高くなります。図3のグラフは、さまざまな電流レンジにおけるアパーチャ時間と計測ノイズの関係を示したものです。
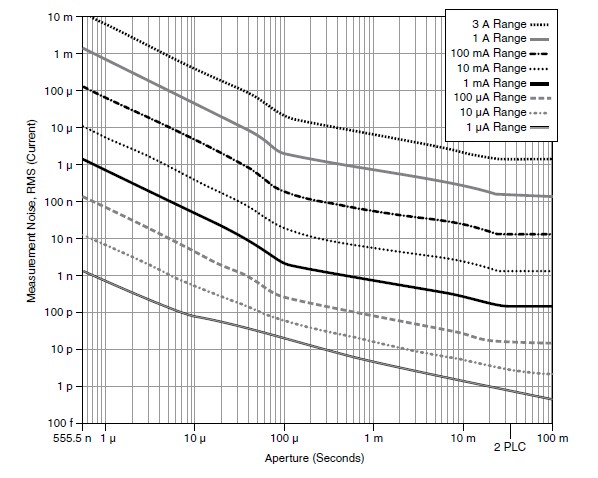
図3.計測アパーチャに対するノイズ特性の例
高い精度で計測を行うには、適切な分解能を確保しながら、全体的なテスト時間を最小化できるアパーチャ時間を選択する必要があります。逆に、低い精度で計測を行う場合や、ライン、負荷の過渡応答などの信号をデジタル化する場合にはアパーチャ時間を短くする必要があります。たとえば、NI PXIe-4139では最大1.8 MS/秒でサンプリングできるため、SMU出力の詳細な過渡特性を調べることができます。電流レンジによっては、1 nA~10 mAのノイズでこの速度を達成することができます。
ソースのアップデートレート
SMUでは、アップデートレートによってSMUの出力電圧または出力電流の変化の速度を調節することができます。たとえば、アップデートレートが100 kS/秒のSMUであれば、10 μsごとに新たな値をソースすることが可能です。アップデートレートの高いSMUであれば、時間のかかるI-Vスイープを従来のSMUよりもかなり高速で実行することができます。また、アップデートレートの高いSMUを使用すると、正弦波など、従来とは異なるシーケンスでのソース供給も行うことができます。
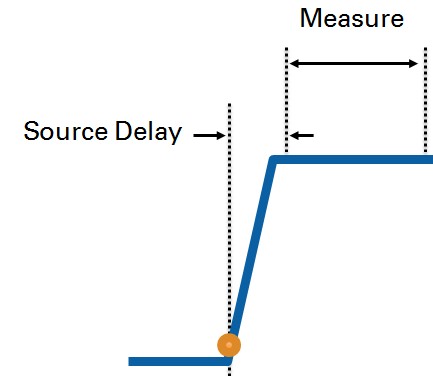
図4.ソースの遅延 (ステップ電圧の出力開始から計測開始までの時間) を変化させることで、SMUのアップデートレートを制御する。
過渡応答
過渡応答とは、電圧や電流の急激な変化に対する出力の応答のことです。急激な変化は、負荷の変化といった外部の事象か、ステップ電圧の出力といったSMU内部の事象のいずれかによって生じます。
負荷の外部変化
外部の負荷電流が変化すると、電圧も急激に変化して、目的の出力電圧を一時的に下回ります。過渡応答は、特定の量の負荷の変化 (ΔI) が生じた場合に供給電圧が一定の電圧の範囲内 (ΔV) に回復するまでにかかる時間として規定されます。モバイルデバイスに電力を供給するときは、過渡応答が高速であることが不可欠です。テスト対象デバイス (DUT) による負荷電流が瞬時に大きく変化すると出力電圧が低下し、それに対して電源の制御回路は出力電圧を元の値に戻そうとします。一般的なプログラマブル電源の場合、この処理には数百μsの時間を要します。それに対し、NI PXIe-4154では過渡応答が20 μsに抑えられています (「高速」モード設定時)。そのため、シミュレータはテストの実行中に生じる負荷電流の変化に素早く対応することができます。回復時間が短いというのは、パルス通信プロトコルを実装する多くの無線通信デバイスにとって最も歓迎すべき特性です。
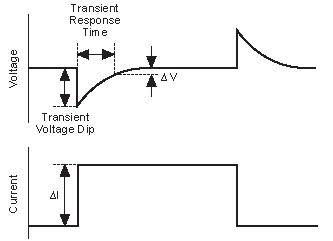
図5.過渡応答の一般的な規定方法
SMU出力の変更
SMUの出力を変更する場合、そのSMUに対してどのような過渡設定を行うかで、出力がどれだけ素早く増加して目的の出力に到達するかが決まります。オーバーシュートや発振を生じることなく、高速な立ち上がり時間が得られるのが理想的な過渡応答です。多種多様な負荷に対して、過渡応答と供給の安定性の間にトレードオフが発生します。最高速の過渡応答を得るには、デバイスに高ゲイン帯域幅 (GBW) 積が必要ですが、GBWは高ければ高いほど、任意の負荷でデバイスが不安定になる可能性も高くなります。そのため、多くのデバイスでは、GBWを抑えることで広範な条件下で安定性を確保できるようにしています。なかには、ある程度のカスタマイズ性を備えているデバイスもあり、その場合はさまざまな条件下で性能を最適化することができます。たとえば、従来型SMUの多くは、最大50 μFの容量を持つデバイスに対して使用するための「高容量」モードを備えています。
NIのSMUには、NI SourceAdaptというデジタル制御ループテクノロジを採用しているものがあります。このテクノロジにより、SMUの過渡応答をカスタムで調節して、特定の負荷に対して最適化することができます。これにより、設定時間を最小限に抑えて待機時間とテスト時間を短縮することができます。また、オーバーシュートの発生を抑えることでDUTを保護し、発振を防ぐことでシステムの安定性を確保することが可能になります。プログラミングでSMUの応答を調節できるため、高速テスト向けに構成したSMUを高安定性テスト向けに再構成することも簡単に行えます—これは、テスト装置の投資収益率の最大化とより良好なテスト結果の獲得の同時達成に貢献します。
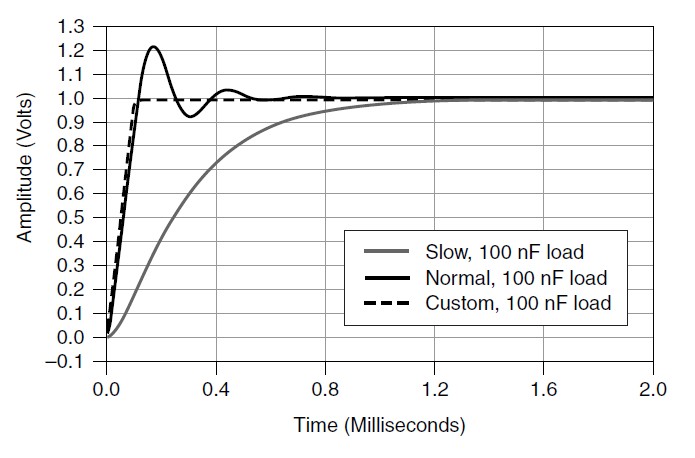
図6.NI PXIe-4139の特徴は構成可能な過渡応答設定で、出力制御ループの負荷補正が柔軟に行える。
NIオンラインカタログにアクセスして、SourceAdaptでフィルタリングすれば、SourceAdaptテクノロジをサポートしているNI PXIソースメジャーユニットを確認することができます。
シーケンスまたはスイープ
通常、SMUはシングルポイントモードとシーケンスモードのうちいずれかの出力モードで動作します。シングルポイントモードでは、SMUの出力は1つの値に限られます。一方、シーケンスモードでは、出力が一連の値に順次変化し、それぞれの出力値の条件下でI-Vデータが計測されます。
シングルポイントソースモード
シングルポイントモードは、たとえばダイオードの順方向電圧のテストなどのように、単一の値を使用してI-Vデータを取得するケースで従来から使用されています。あるいは、SMUからICに電源を供給する場合のように、DUTに電力を供給する場合にも使用されてきました。シングルポイントモードでは、ソフトウェアによりタイミング設定したシーケンスが使われることがあります。このケースでは、ソフトウェアによる一連のシングルポイントSMU出力を順次出力することができます。ソフトウェアタイミングによるシーケンスは、事前に計画しないと特定の機能を変更することができないSMUで、ハードウェアタイミングのシーケンスモードの代わりに使用することができます。
シーケンスモード
シーケンスモードで動作する場合、SMUは一連のハードウェアタイミングで値を出力するので、高速で確定性の高い出力が得られるというメリットがあります (他のPXI計測器との同期もとれるというメリットもあります)。通常、このモードではSMUによってDC電圧かDC電流を供給し、電圧と電流を計測してからシーケンス内の次の設定に遷移するという手順で計測が行われます。SMUによっては、シーケンスの各ステップで、出力レベルや、電流/電圧の制限値、アパーチャ時間、過渡応答といったプロパティを変更する機能を備えているものもあります。大容量のシーケンスを保存するため、専用のオンボードメモリを備えたSMUや、ホストからSMUに向けた低遅延のストリーミング機能をサポートするSMUもあります。たとえばNI PXIe-4138やNI PXIe-4139の場合、広帯域幅かつ低遅延のPCI Expressを介してホストPCからSMUへとデータを転送することで、膨大な数の設定値と属性を持つシーケンスを透過的に出力することができます。
シーケンスモードは、I-V特性の評価やバーンインテストなどのアプリケーションでよく使用されます。また、RF用ICのテストなど、ほかの計測器との厳密な同期が必要なアプリケーションでは、多くの場合、必須の条件となります。
パルス生成
SMUを使用する半導体テスト機器は多くの場合、何らかの形態のソースと計測操作を伴います。通常、SMUをシーケンスモードで使用する場合、SMUによってDC電圧またはDC電流を供給し、電圧と電流を計測してからシーケンス内の次の設定に遷移するという手順を踏みます。基本的なDCスイープでは、シーケンスが完了するまで出力が段階的に引き上げられます。以下の図は、5つのステップの電流値シーケンスを示しています。
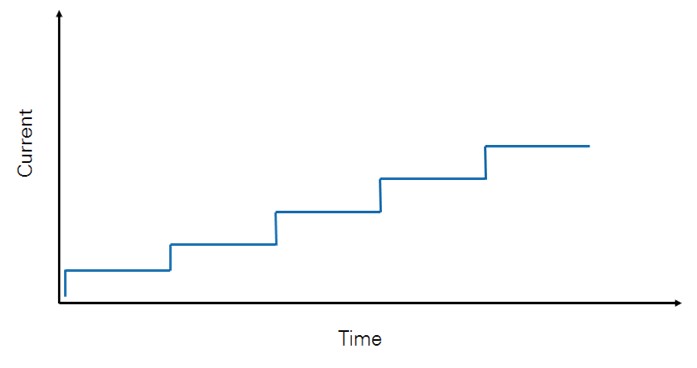
図7.基本的なDCスイープの5ステップシーケンスの例
高電力のアプリケーションなどでは、SMUの出力を遮断することなくシーケンス全体をスイープすると、誤動作が生じたり、複雑なテスト設定が必要になることがあります。このようなアプリケーションでは、パルス出力のSMUの方が適しています。パルス出力でも、さまざまな設定値でのソースと計測を行うことができます。加えて、DUTの発熱も最小限に抑えることが可能です。パルススイープとDCスイープは、設定値を出力して一定値に到達するの待ち、計測を行うという点では似ています。パルステストの主な違いは、短いパルス持続時間経過後にソースがバイアスレベルに戻るという点です。多くの場合、バイアスレベルではDUTへのソースは停止 (0V、0Aなど) されます。
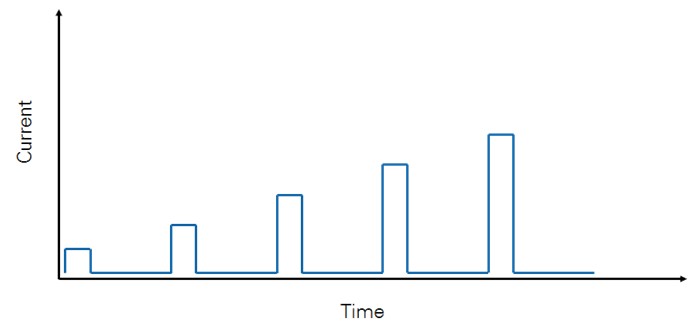
図8.パルス出力の場合、ソースはいったんバイアスレベルに戻ってから次の設定値に遷移する。
理想的な条件下では、上記の2つのグラフのパルスシーケンスとDCシーケンスは、同じI-Vデータを返します。しかし、これまで述べたように、DCシーケンスは、DUTを介してより多くの熱を放散するので、動作が異常になり、テスト結果の低下を招く恐れがあります。そのため、この様な用途では、パルスシーケンスの方が適しています。パルスモードでテストする場合、パルス幅は、デバイスが完全なオン状態に達して、安定した測定を行うのに長さが十分であるものの、DUTの自己発熱を最小限に抑えるのに十分短くする必要があります。加えて、パルスの出力時には、高速でクリーンなSMUの応答がより重要になります。これは、SMUが出力を短い増分ステップで徐々に増加させるのではなく、必ずパルスバイアスレベルから開始しているためです。
SMU製品によっては、大電流を必要とするアプリケーション向けに、従来のDC電力境界の範囲外のパルスを生成できるものもあります。たとえば、NI PXIe-4139は50 Vで最大10 Aのパルスを生成することができます。つまり、最大500 Wの瞬時電力を供給可能だということです。負荷とSourceAdaptの制御設定により、パルス幅は50 μ秒まで短くすることができます。これだけパルス幅が短ければ、テストの実行時間を短縮できるだけでなく、DUTからの熱放散も抑えられます。そのため、ヒートシンクなどの放熱メカニズムを使用することなくテストを行うことができます。
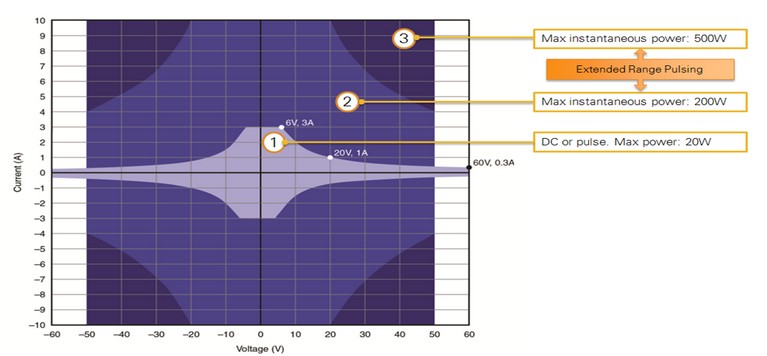
図9.NI PXIe-4139のI-V境界
チャンネル密度
モジュール式のSMUには、いくつかのメリットがあります。1つはそのコンパクトなサイズです。従来型のSMUは、専用のディスプレイ、プロセッサ、電源、ファン、ノブといった冗長なコンポーネントを備えています。このことから、チャンネル数の多いシステムを構築しようとするとその作業は非常に複雑になります。一方、モジュール式のSMUでは、シャーシとコントローラにおいてコンポーネントを共有します。冗長なコンポーネントが存在しないので、従来型のSMUを使用する場合よりも占有面積が小さくなります。これによって、テストシステムのサイズを縮小し、消費電力を低減することが可能になります。
アプリケーションで必要となるチャンネル数は、時間の経過に伴って変化する可能性があります。従来のボックス型SMUには1つか2つのチャンネルしかありませんが、多くのアプリケーションではそれ以上の数のチャンネルが必要になります。特に、半導体業界で使用される並列実行型のI-Vテストシステムでは、小さなスペースで多数のSMUチャンネルを設置しなければなりません。NIのモジュール式SMUを使用すれば、単一のPXIシャーシ内で複数の計測器を組み合わせてシステムを構築することができます。その際、19インチ、4Uラックのスペースで最大68ものSMUチャンネルを設けることができます。従来型のSMUでは、このスペースに4~8チャンネルしか設置できないでしょう。PXIプラットフォームのコンパクトなサイズとモジュール性を生かし、ほかのPXIベースの計測器 (オシロスコープ、スイッチ、RF計測器など) とSMUを組み合わせることで、高性能のミックスドシグナルテストシステムを構成することも可能です。
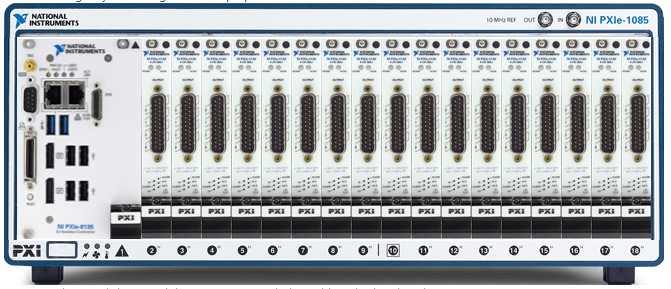
図10. NIの高密度なSMUを使用すれば、単一の4Uラックのスペースに最大68個のSMUチャンネルを備えるシステムを構成することができる。
タイミングと同期
「トリガ」とはデバイスに動作を開始させる信号です。「イベント」は操作が完了した、または特定の状態に達したことを示すデバイスからの信号です。トリガとイベントを使用することで、単一のNI電源/SMU内で行う処理や、PXI/PXI Expressをベースとするほかの計測器との間で行う処理の同期をとることができます。多くのアプリケーションでは、デジタイザ、信号発生器、デジタル波形アナライザ、デジタル波形発生器、スイッチといったさまざまな種類の計測器が使用されます。PXIベースの計測器やNIのモジュール式計測器は、そうしたアプリケーションにおいて、外部の配線を使うことなくあらゆる種類の計測器の同期をとることが可能なタイミング機能/同期機能を備えています。
トリガ機能では、以下のようなトリガを選択することができます。
- 開始:ソースユニットとメジャーユニットは、トリガを受信するまで何も行いません。
- ソース:ソースユニットがソース構成を変更する前、デバイスはこのトリガを待機します。
- 計測:このトリガを受信すると、メジャーユニットは計測を行います。メジャーユニットが計測を行っている間、このトリガは無視されます。
- シーケンスアドバンス:ソースユニットは、シーケンスの反復が完了して次の反復を開始される直前まで、このトリガを待機します。
- パルス:ソースユニットは、このトリガによりパルスバイアスからパルスレベルに遷移します。
モジュール式SMUのNI PXIe-4138/4139では、PXIプラットフォームのトリガが最適化されています。これらのモジュールでは、PXIシャーシのバックプレーンを介してトリガとイベントの送受信を行うことで、プログラミングやシステムの配線が簡素化されています。また、ハードウェアタイミングを使用し、複数のSMU間でハンドシェイクの同期をとる高速シーケンスエンジンを備えています。
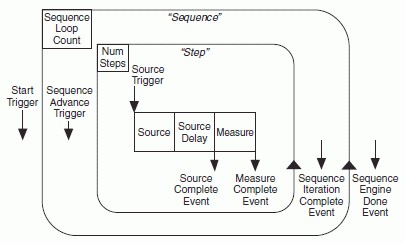
図11.トリガと同期に使用するシーケンスエンジン図
モジュール式SMUのNI PXIe-4138/4139ではまた、PXIの広帯域幅、低遅延という利点を生かし、ホストPCとSMU間で直接DMA転送を行うことができます。これにより、大量の波形データや計測データを、計測器の最大アップデートレート (100 kS/秒) とサンプリングレート (1.8 MS/秒) で透過的にストリーミングすることが可能になり、従来型の計測器でバスに生じていた帯域幅と遅延のボトルネックが解消されます。
ソフトウェア、解析機能、カスタマイズ性
アプリケーションで使用するモジュール式SMUを選定する際には、ソフトウェアと解析機能の選択が非常に重要です。これらの要素を検討することは、2台の計測器間で二者択一を行う際に役立ちます。
通常、スタンドアロン型のSMUでは、ベンダーが定義した機能に対して基本的なレジスタレベルのコマンドを使用します。一方、モジュール式のSMUではユーザによる定義が可能で、個々のアプリケーションに対して柔軟に対応することができます。ボックス型のSMUは、多くのエンジニアが共通して求める多くの標準的な機能を備えています。当然ながら、そうした標準的な機能はすべてのアプリケーションに対応できるものではなく、特に自動テストアプリケーションで弱点が露呈します。たとえば、オシロスコープでの計測を定義する場合、機能が固定されたスタンドアロン型のSMUではなく、PCのアーキテクチャを活用しつつ、要件に応じてアプリケーションのカスタマイズが可能なモジュール式SMUを選択するほうが有利でしょう。
NIのSMUはすべて、無償のドライバソフトウェアであるNI-DCPowerを使用してプログラムされます。NI-DCPowerは、NIの電源またはSMUに付属した、IVI (Interchangeable Virtual Instruments) 準拠の計測器ドライバで、これによりNIのすべてのプログラマブル電源とSMUとの通信が可能になります。NI-DCPowerでは、NIの電源またはSMUの機能を実現する一連の操作とプロパティ、およびインタラクティブなソフトフロントパネルを提供しています。
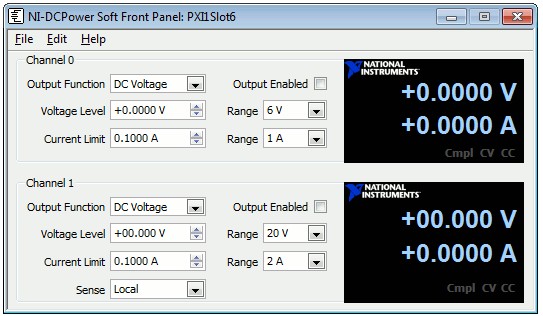
図12.ソフトフロントパネルを使用して、モジュール式SMUによる計測を素早く実行することができる。
ソフトフロントパネル以外にも、NI-DCPowerドライバソフトウェアを使用してモジュール式SMUをプログラムすることで、NI LabVIEW、NI LabWindows™/CVI、Visual Basic、.NETを使用した多様なアプリケーションでの一般的計測とカスタム計測の両方に対応することができます。またこのドライバは、LabVIEW内での特別な構成ベースの機能をサポートしています。
高精度計測のための接続
4線センスとも呼ばれるリモートセンスによる計測方法では、DUTへの接続に線が4本必要になります (スイッチシステムを使用してチャンネルカウントを増やしている場合は4線式スイッチが必要)。出力リード線の電圧降下が大きい場合にリモートセンスを使用すると、より正確な電圧の出力と計測が可能になります。リモートセンスを使用してDC電流を出力するときは、出力端子ではなくセンスのリード線の末端で電圧制限が計測されます。リモートセンスを使用することで、ローカルセンス使用時と比較してより正確なDUT端子電圧を計測することができます。センスのリード線は、DUT端子にできるだけ近づけて接続するのが理想です。
もう1つ検討しなければならないことがあります。それはガード (保護機能) です。「ガード」とは、HIとLO間の漏れ電流および寄生キャパシタンスの除去を行う技術です。ガード端子は、HI端子電圧に追随するユニティゲインバッファによって駆動します。保護機能を備える一般的なテストシステムでは、ガード端子をHI端子とLO端子の間に接続します。この接続によりHI端子とガード間の電圧降下は0 Vとなり、HI端子から漏れ電流は発生しません。ガード出力からLO端子にわずかに漏れ電流が流れることがありますが、その電流はHI端子ではなくユニティゲインバッファによって供給されるので、SMUの出力や計測に影響を与えません。
たとえば、NI PXIe-4138/4139の計測回路は、出力端子 (ローカルセンス) またはセンス端子 (リモートセンス) の電圧値と電流値を同時に読み取ることができます。これらの計測は、常に同期がとられた2つの積分型ADCを使用して行われます。
また図14に示すように、NI PXIe-4138/4139の出力コネクタにはガード端子とセンス端子があります。ガード端子を使用すると、ケーブルとテスト装置にガード機能を実装することができます。リモートセンスが有効の場合、センス端子を使用してケーブルやスイッチでの電流抵抗損失による電圧降下を補正することができます。
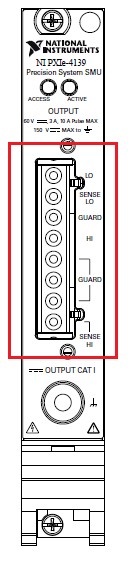
図14.NI PXIe-4138/4139は、出力コネクタにガード端子とセンス端子を備えている。
次のステップへ
モジュール式SMUは、従来の計測器と同等またはそれ以上の計測性能を実現します。それと同時に、計測とチャンネルに関する最新技術をサポートしたプラットフォームによって、変化するニーズに対応することができます。ただし、どちらの製品を購入する場合でも、本稿で取り上げた項目を検討することが重要です。アプリケーションの要件、コストに関する制約、性能、将来の拡張性を事前に検討しておくことにより、全てのニーズに最も適した計測器を選定することができます。
The mark LabWindows is used under a license from Microsoft Corporation.Windows is a registered trademark of Microsoft Corporation in the United States and other countries.