Synchronisation basée sur les signaux des modules d’entrée analogique de la Série C avec NI-DAQmx dans LabVIEW
Aperçu
Les contrôleurs et châssis CompactDAQ prennent en charge de nombreux modules d’E/S de la série C avec divers types de mesure tels que l’accélération, la température et la déformation. Lorsque les applications nécessitent une synchronisation étroite entre les mesures, le matériel CompactDAQ, associé à l’API NI-DAQmx, propose aux utilisateurs des options de configuration flexibles permettant d’atteindre le niveau de synchronisation souhaité sur plusieurs modules d’E/S de la Série C. Ce document présente les options basées sur les signaux qui permettent de synchroniser les modules d’E/S de la Série C.
Contenu
- Modules d’entrée analogique de la Série C
- Synchronisation basée sur le temps vs. synchronisation basée sur les signaux
- Démarrer la synchronisation par déclenchement
- Synchronisation par horloge d’échantillonnage
- Tâche sur plusieurs périphériques
- Synchronisation multifréquence
- Tâches multichâssis
- Conclusion
- Ressources supplémentaires
Modules d’entrée analogique de la Série C
Les modules d’entrée analogique de la Série C peuvent être répartis en quatre groupes en fonction de leur synchronisation : À horloge de référence, delta-sigma, à échantillonnage lent et registre d’approximations successives (SAR). Les modules à horloge de référence effectuent la conversion à l’aide d’une horloge interne embarquée. Cette horloge embarquée est pilotée à l’aide d’une boucle à verrouillage de phase sur une autre horloge interne ou sur des horloges extérieures au module. Les modules delta-sigma utilisent un C A/N 24 bits et se servent d’une horloge interne au module pour effectuer la conversion. Les modules à échantillonnage lent utilisent un C A/N 24 bits et se servent d’une horloge externe provenant du contrôleur ou du châssis CompactDAQ pour effectuer la conversion. Enfin, les modules SAR utilisent un C A/N à approximations successives (12 ou 16 bits) et effectuent la conversion à l’aide d’une horloge externe. La méthode d’implémentation de la synchronisation dépend généralement du groupe auquel appartient le module. Vous trouverez une liste des groupes de modules dans la section Ressources de ce tutoriel. Dans ce tutoriel, la synchronisation est définie comme les étapes ou techniques utilisées directement ou indirectement via le driver DAQmx afin de démarrer des mesures en même temps et de supprimer la dérive entre les mesures ultérieures. Bien que le résultat de ces étapes renforce l’alignement d’un échantillon à l’autre, le but est d’empêcher la dérive.
Synchronisation basée sur le temps vs. synchronisation basée sur les signaux
La synchronisation basée sur le temps et la synchronisation basée sur les signaux sont deux paradigmes dédiés distincts que vous pouvez utiliser pour synchroniser des mesures à l’aide des modules de la série C. Ce document traite de la synchronisation basée sur les signaux. Pour plus de détails sur la synchronisation basée sur le temps, consultez l’article Synchronisation basée sur le temps des modules d’entrée analogique de la Série C avec NI-DAQmx dans LabVIEW.
- La synchronisation basée sur les signaux décrit la synchronisation via des signaux acheminés entre des périphériques. Un périphérique qui attend qu’un signal numérique haut se produise sur une ligne de déclenchement utilise une synchronisation basée sur les signaux.
- La synchronisation basée sur le temps décrit la synchronisation via des événements planifiés en fonction de l’heure sur un périphérique. Un périphérique qui attend que l’heure locale atteigne 17 h 00 pour démarrer utilise la synchronisation basée sur le temps.
Chaque méthode de synchronisation a ses avantages et celle qui s’avère appropriée varie selon l’application.
Démarrer la synchronisation par déclenchement
Cette section présente différentes méthodes permettant de contrôler le début de l’acquisition sur plusieurs modules. Étant donné que l’objectif est simplement d’aligner le temps de départ de plusieurs tâches, cette méthode est le moyen le plus rudimentaire de réaliser la synchronisation.
La première méthode s’appuie sur une fonction logicielle qui, lorsqu’elle est exécutée, démarre l’acquisition comme défini par une tâche DAQmx. Si cette fonction s’exécute dans chaque tâche relativement au même moment, un niveau similaire de synchronisation est observé pour le début des données.
Lorsqu’un cadencement matériel est utilisé et qu’aucun déclenchement n’est configuré, l’exécution du VI DAQmx - Démarrer une tâche lance l’acquisition. Ce VI force le contrôleur ou châssis CompactDAQ à envoyer une impulsion numérique qui lance l’acquisition. Si les VI DAQmx - Démarrer une tâche de deux tâches indépendantes sont placés dans la même étape d’une structure Séquence déroulée, les deux tâches commencent au même moment relatif. Cependant, la séparation entre les temps de début exacts des deux tâches dépend du temps d’attente logiciel entre les exécutions DAQmx - Démarrer des VI et variera donc en raison du système d’exploitation. La figure 1 illustre cette méthode : le démarrage de deux tâches d’entrée analogique est contrôlé lors de l’exécution avec les VI DAQmx - Démarrer une tâche à la même étape d’une structure Séquence déroulée.
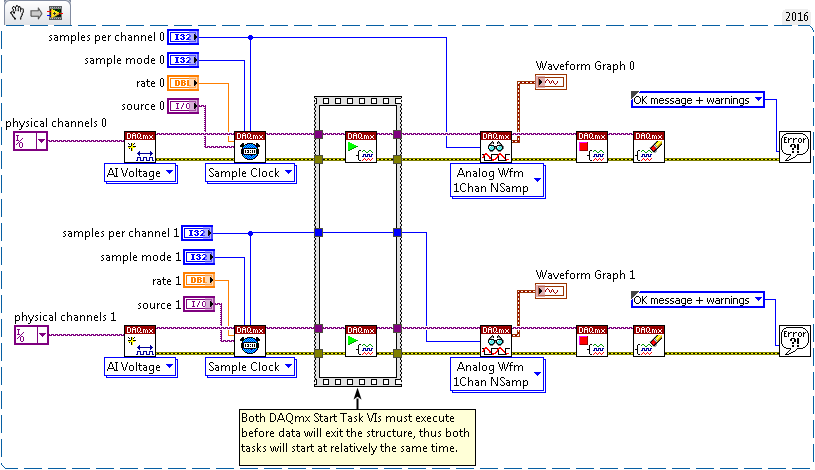
Figure 1 : Chaque tâche démarre dans une structure Séquence déroulée
Il est possible d’utiliser le VI DAQmx - Déclenchement pour éviter les retards. Cette méthode permet de configurer les tâches pour qu’elles démarrent sur un déclencheur matériel plutôt que via l’appel d’une fonction logicielle. Une tâche envoie le déclenchement et l’autre tâche le reçoit lorsque cette fonctionnalité est utilisée pour la synchronisation de tâches. La tâche qui reçoit le déclenchement attend le déclenchement envoyé par la tâche maître pour lancer l’acquisition ou la génération. Lorsque la tâche maître est lancée, un déclenchement numérique est envoyé par celle-ci et il démarre toute tâche configurée pour démarrer sur la base de ce signal. La figure 2 illustre cette méthode : le VI DAQmx - Contrôler une tâche est appelé avant que la tâche n’accepte le signal ai/StartTrigger. C’est donc l’assurance que la tâche maître réserve le signal de déclenchement ai/Start Trigger.
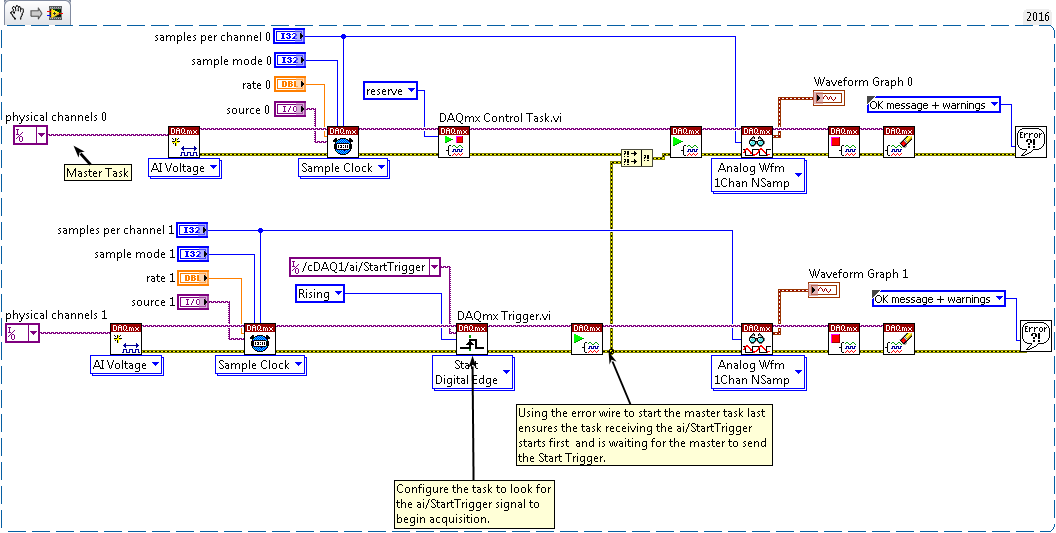
Figure 2 : Configuration du déclenchement pour lancer les deux tâches
Vous devez savoir quel moteur de cadencement est réservé à une tâche pour comprendre la nomenclature des déclenchements et des cadencements. Les contrôleurs et châssis CompactDAQ ont trois moteurs de cadencement d’entrée analogique : ai, te0 et te1. Chaque tâche exécutée en simultané est assignée à un moteur de cadencement différent afin de contrôler l’horloge d’échantillonnage et les déclenchements. Le signal ai/StartTrigger est par exemple assigné au moteur de cadencement ai. Le driver NI-DAQmx assigne automatiquement chaque tâche d’entrée analogique à un moteur de cadencement en commençant par ai, puis te0 et enfin te1. Il est important de savoir quelle tâche utilise quel moteur de synchronisation, c’est pourquoi nous définissons les tâches qui reçoivent le déclenchement de démarrage pour qu’elles utilisent le signal du moteur de synchronisation de la même tâche maître. En commençant par réserver la tâche maître, nous l’assignons spécifiquement au moteur de cadencement ai. Il est alors possible de configurer les deux tâches pour utiliser le déclenchement de lancement de la tâche maître (ai/StartTrigger).
Synchronisation par horloge d’échantillonnage
La technique ci-dessus permet de lancer les tâches en même temps grâce au partage d’un déclenchement de démarrage. Cette méthode ne garantit toutefois pas que les cadencements des mesures ultérieures entre les deux tâches ne dériveront pas l’un de l’autre. Il est possible de partager une horloge d’échantillonnage entre les deux tâches pour que toute tâche qui utilise l’horloge partagée puisse prélever des échantillons en même temps. Les deux tâches ne dériveront donc pas l’une de l’autre. Comme nous l’avons vu plus haut, les contrôleurs et châssis Compact DAQ ont trois moteurs de cadencement d’entrée analogique ; l’ordre de réservation des tâches détermine donc le moteur de cadencement utilisé par chacune d’entre elles. La figure 3 ci-dessous montre comment partager l’horloge d’échantillonnage entre les tâches.
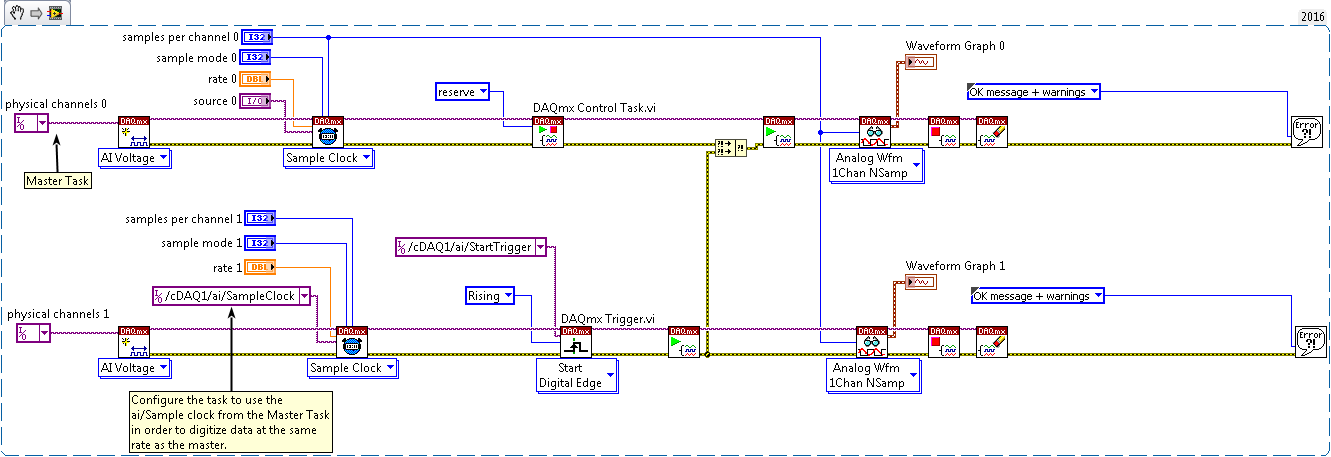
Figure 3 : L’horloge d’échantillonnage et le déclenchement sont partagés
Étant donné que chaque tâche partage la même horloge d’échantillonnage, les deux tâches doivent opérer à la même fréquence d’échantillonnage pour cette technique. Cette méthode de synchronisation ne fonctionne pas pour les modules delta-sigma ou à horloge de référence. Ces modules utilisent une horloge intégrée au module pour acquérir leurs mesures. Les sections suivantes (Tâche sur plusieurs périphériques et Tâches multifréquence) expliquent comment synchroniser les modules delta-sigma.
Tâche sur plusieurs périphériques
Pour simplifier la configuration de la synchronisation, NI-DAQmx permet de placer dans la même tâche plusieurs voies d’entrée analogique provenant de différents modules. Pour placer différents modules dans la même tâche, spécifiez plusieurs voies de différents modules dans l’entrée Voie physique du VI Créer une voie virtuelle. Il convient d’inclure les voies de différents modules dans le même processus DAQmx - Créer une voie si elles doivent avoir la même configuration de mesure (gamme de tension et unités) et des informations de cadencement et de déclenchement identiques.
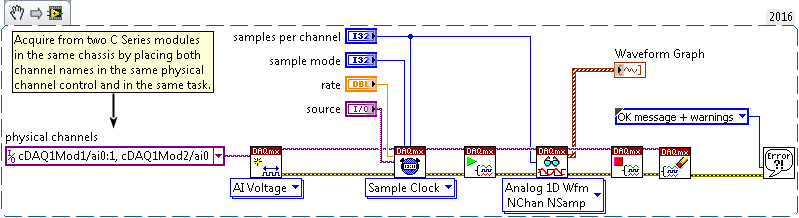
Figure 4 : Utilisation de différents modules dans la même tâche
Si les modules effectuent des mesures variées (p. ex. tension ou courant), nécessitent des gammes de mesure différentes ou doivent utiliser des unités de mesure distinctes, utilisez plusieurs instances du VI DAQmx - Créer une voie virtuelle comme indiqué ci-dessous.
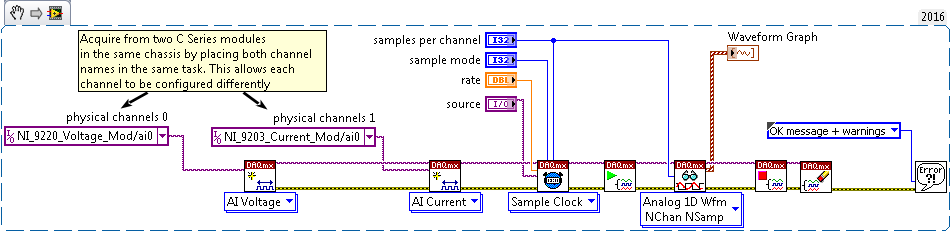
Figure 5 : Plusieurs VI DAQmx - Créer une voie virtuelle utilisée pour une tâche afin de spécifier différents types de mesure
Vous pouvez combiner différents types de modules d’entrée analogique (SAR, delta-sigma, échantillonnage lent et à horloge de référence) dans la même tâche et autoriser le driver NI-DAQmx à les synchroniser pour vous. Concernant les tâches sur plusieurs périphériques, DAQmx choisit la meilleure méthode possible afin de synchroniser les modules. Vous trouverez ci-dessous une explication des différents scénarios et de la manière dont la tâche sur plusieurs périphériques synchronise les mesures.
Deux modules SAR/à échantillonnage lent : lorsque deux modules SAR, des modules SAR et à échantillonnage lent, ou deux modules à échantillonnage lent sont placés dans la même tâche matérielle chronométrée, le driver DAQmx partage l’horloge d’échantillonnage et le déclenchement de démarrage du même châssis ou contrôleur entre les deux modules. Pour la configuration module SAR et à échantillonnage lent, ce n’est pas lui qui détermine la fréquence maximale à laquelle les données sont renvoyées. Le driver renvoie des échantillons dupliqués pour le module à échantillonnage lent pour que vous puissiez exécuter le module SAR à la fréquence la plus rapide possible.
Deux modules delta-sigma : lorsque deux modules delta-sigma sont placés dans la même tâche d’entrée analogique à cadencement matériel, le driver DAQmx partage la base de temps maître la plus rapide entre tous les modules, réinitialise leurs C A/N en se basant sur la même impulsion de synchronisation, partage un déclenchement de démarrage et ajuste le temps de réinitialisation. La base de temps maître est l’horloge interne 12,8 ou 13,1 MHz que les modules delta-sigma utilisent pour acquérir des mesures. Pour ce qui est du comportement par défaut d’un cDAQ-9185 ou cDAQ-9189 (châssis sensible au temps), la base de temps maître provient du châssis et non du module ayant la base de temps maître la plus rapide.
Deux modules à horloge de référence : lorsque deux modules à horloge de référence sont placés dans la même tâche d’entrée analogique cadencée par matériel, le driver DAQmx partage l’horloge de référence du module maître avec l’autre module, réinitialise leurs C A/N sur la base de la même impulsion de synchronisation, partage un déclenchement de démarrage et ajuste le temps de réinitialisation. L’horloge de référence est la base de temps maître interne sur laquelle le module suivant se verrouille. Le comportement par défaut d’un châssis sensible au temps est que l’horloge de référence provient du châssis plutôt que du module maître.
Module à horloge de référence et module delta-sigma : lorsqu’un module à horloge de référence et un module delta-sigma sont placés dans la même tâche d’entrée analogique à cadencement matériel, le driver DAQmx achemine l’horloge de référence du module à horloge de référence vers la base de temps maître du module delta-sigma. Les deux modules reçoivent une impulsion de synchronisation du châssis ou du contrôleur qui réinitialise leur C A/N respectif et partagent un déclenchement de démarrage ; le temps de réinitialisation de chaque module est ajusté. Dans un châssis sensible au temps, l’horloge de référence du module à horloge de référence n’est pas partagée avec la base de temps maître du module delta-sigma ; le châssis achemine en revanche une horloge de référence vers le module à horloge de référence et une base de temps maître vers le module delta-sigma. Le module à horloge de référence (NI 9775) ne peut pas être en mode d’enregistrement s’il est utilisé dans la même tâche qu’un module delta-sigma.
Module delta-sigma/à horloge de référence et module SAR/à échantillonnage lent : lorsqu’un module SAR ou à échantillonnage lent et un module à horloge de référence et delta-sigma sont placés dans la même tâche d’entrée analogique à cadencement matériel, le driver DAQmx configure le module delta-sigma ou le module à horloge de référence pour qu’il exporte son horloge d’échantillonnage interne afin qu’elle soit utilisée par le module SAR ou à échantillonnage lent. L’horloge d’échantillonnage interne est équivalente au débit de données configuré pour le module delta-sigma
où
fs est le débit de données
fm est la base de temps maître interne indiquée dans chaque fiche de spécifications de module
n/a/b sont des diviseurs.
L’horloge d’échantillonnage interne pour le module à horloge de référence est spécifiée dans la fiche technique du périphérique. Le driver renvoie des échantillons dupliqués pour le module à échantillonnage lent afin de permettre au module delta-sigma ou à horloge de référence de s’exécuter plus rapidement. Le module à horloge de référence (NI 9775) ne peut pas être en mode d’enregistrement s’il est utilisé dans la même tâche qu’un module SAR ou à échantillonnage lent.
Synchronisation multifréquence
Lorsque vous référencez plusieurs modules dans une tâche, la même fréquence d’échantillonnage s’applique à toutes les voies. Certaines applications peuvent toutefois nécessiter une synchronisation à des fréquences différentes.
Deux modules SAR : il vous suffit de partager un déclenchement de démarrage pour synchroniser deux modules SAR ou à échantillonnage lent effectuant l’acquisition à des fréquences différentes dans un châssis ou des contrôleurs CompactDAQ. L’horloge d’échantillonnage utilisée par chaque module est dérivée du même signal. Les mesures seront donc synchronisées si les modules se trouvent dans le même châssis.
Deux modules DSA : pour synchroniser deux modules delta-sigma qui effectuent l’acquisition à des fréquences différentes, définissez les tâches pour qu’elles partagent une base de temps maître, une impulsion de synchronisation (sync pulse) et un déclenchement de démarrage communs. L’horloge de la base de temps maître est acheminée d’un module à un autre à la figure 6. Remarquez que le nœud de propriété de cadencement NI DAQmx SampleClck.Timebase.Src se réfère au même signal de 12,8 ou 13,1 MHz que la base de temps maître indiquée dans le mode d’emploi et les spécifications/la fiche technique. Cette horloge est aussi dite de suréchantillonnage, car nombre de ses tops sont nécessaires pour produire un échantillon.
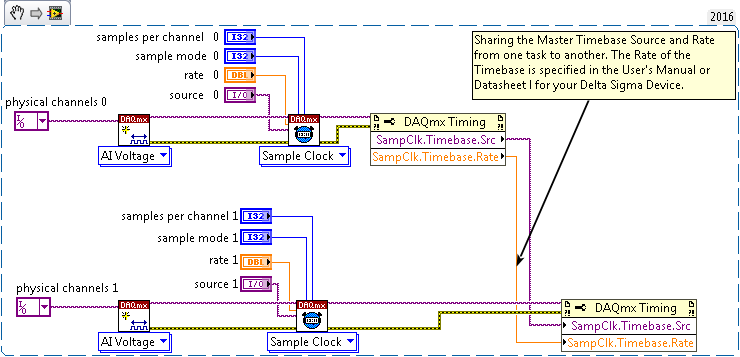
Figure 6 : Partage de l’horloge de suréchantillonnage
Un périphérique qui utilise un module delta-sigma a un C A/N qui s’exécute librement. Le partage de la base de temps maître garantira que les mesures sont dérivées de la même horloge, mais il y aura un décalage de phase inconnu en raison du départ exact du C A/N. L’étape suivante consiste à partager l’impulsion de synchronisation. L’impulsion de synchronisation permet de réinitialiser le C A/N/C N/A avant qu’il ne commence à acquérir ou à générer des échantillons. Les mesures prises ne seront pas synchronisées en l’absence de ce signal qui réinitialise le C A/N/C N/A. La figure suivante présente les nœuds de propriété qui permettent de partager une horloge de suréchantillonnage et une impulsion de synchronisation.
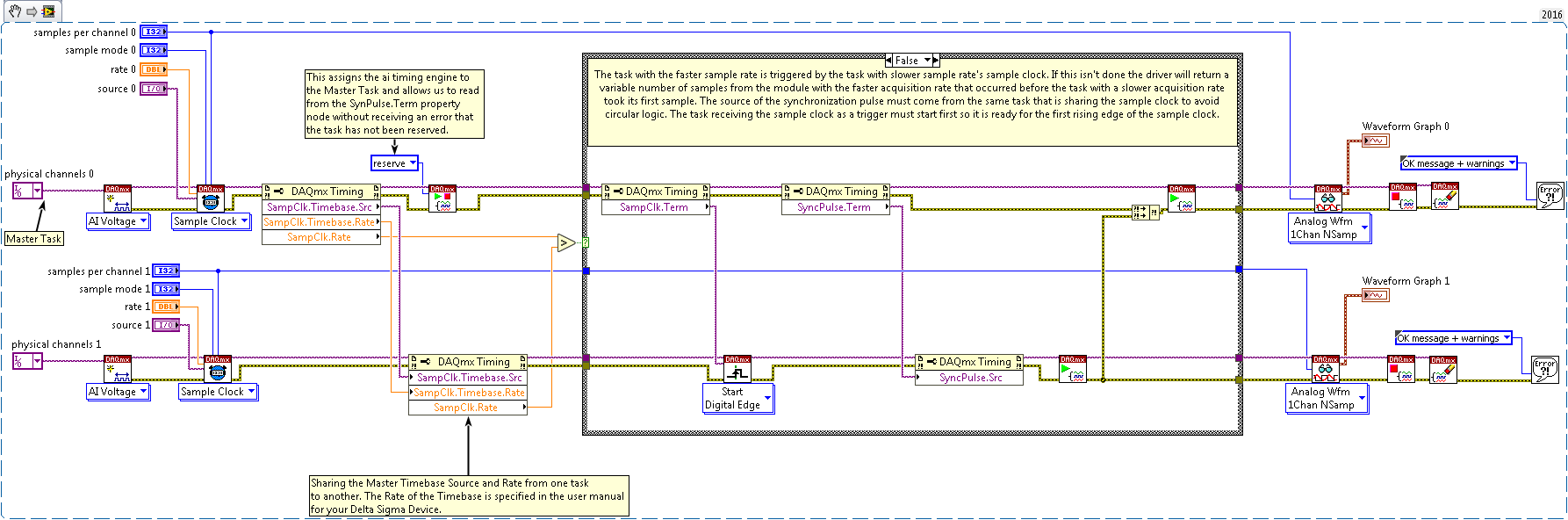
Figure 7 : Partage de l’horloge de suréchantillonnage, du déclenchement de démarrage et de l’impulsion de synchronisation.
La configuration ci-dessus achemine l’impulsion de synchronisation d’une tâche à l’autre en fonction de celle qui s’exécute le plus rapidement. En cas de configuration multifréquence, nous utilisons l’horloge d’échantillonnage de la tâche la plus lente pour déclencher la tâche la plus rapide. Vous verrez pourquoi dans l’exemple.
Le temps de réinitialisation requis par chaque module doit lui aussi être pris en compte. Le temps de réinitialisation est un délai nécessaire au C A/N des modules delta-sigma après avoir reçu l’impulsion de synchronisation jusqu’à ce qu’il commence à acquérir des données. Les modules delta-sigma peuvent avoir des temps de réinitialisation différents selon les modèles. Vous devez tenir compte de ce temps de réinitialisation pour vous assurer que chaque périphérique est passé par la séquence de réinitialisation et qu’il commence à acquérir ou à émettre des échantillons en même temps. Pour bien tenir compte de temps de réinitialisation potentiellement différents, il convient de vérifier le temps de réinitialisation requis pour chaque module et, si nécessaire, d’ajouter un délai aux modules dont le temps de réinitialisation est plus court. La somme du temps de réinitialisation et du délai doit donc être la même pour chaque module.
Il est possible de déterminer le temps nécessaire à la réinitialisation du C A/N à l’aide du nœud ImpSync.TpsRéinitialisation de la propriété de cadencement DAQmx. On compare le temps de réinitialisation des deux tâches pour s’assurer que tous les C A/N terminent leur cycle de réinitialisation en même temps. Le temps de réinitialisation de la tâche ayant le temps de réinitialisation le plus faible est soustrait à la tâche ayant le temps de réinitialisation le plus élevé. Le résultat correspond au temps pendant lequel une tâche a commencé à acquérir des données alors que l’autre tâche est encore en train d’effectuer son cycle de réinitialisation. Nous utilisons une autre propriété NI-DAQmx appelée ImpSync.AttenteReset afin de tenir compte de ce délai. Cette propriété permet de retarder l’impulsion de synchronisation qui sera envoyée à chaque module. Comme indiqué précédemment, le temps de réinitialisation est le délai entre le moment où le C A/N reçoit une impulsion de synchronisation et celui où il commence à acquérir des données. Pour utiliser cette propriété au mieux, mieux vaut la définir à une valeur égale à la différence entre le module qui a le temps de réinitialisation le plus long et le temps de réinitialisation du module. Cela décalera l’impulsion de synchronisation d’un module qui met moins de temps à se réinitialiser, garantissant ainsi que les modules ayant un temps de réinitialisation lent et rapide terminent leur séquence de réinitialisation en même temps. Le code ci-dessous explique comment obtenir le temps de réinitialisation et déterminer le délai de réinitialisation approprié.
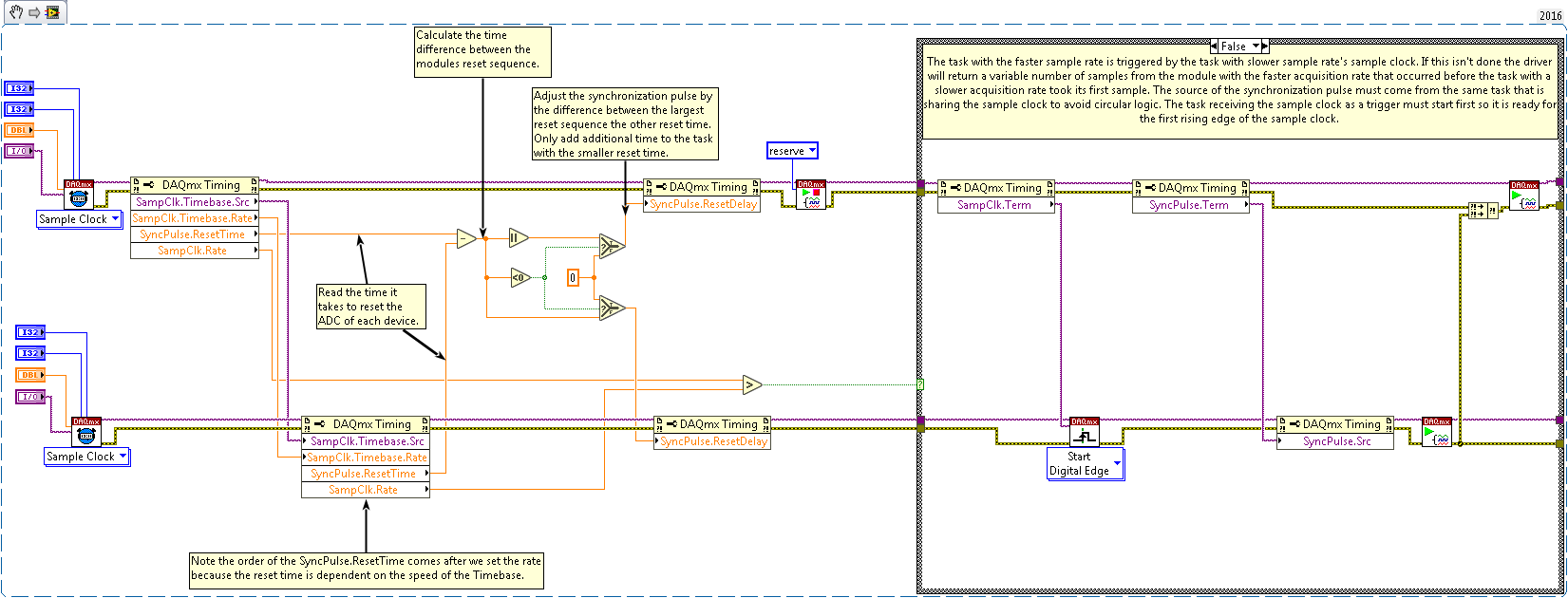
Figure 8 : Interrogation du temps de réinitialisation de l’impulsion de synchronisation et calcul du délai de réinitialisation
Le nœud de propriété NI-DAQmx ImpSync.AttenteReset a une entrée maximale de 0,013 seconde, ce qui pourrait ne pas convenir en cas de différences importantes dans les valeurs de délai de réinitialisation des différents modules. Remarquez l’ordre du nœud de propriété lors de l’interrogation de SyncPulse.ResetTime sur la tâche qui reçoit la base de temps maître. La valeur change selon que la base de temps a 13,1 ou 12,8 MHz. Il est donc important d’appeler le nœud ImpSync.TpsRéinitialisation de cette tâche une fois que le module a été informé de la fréquence de la base de temps maître.
En recherchant les propriétés ImpSync.AttenteReset et ImpSync.TpsRéinitialisation, vous trouverez également ImpSync.TempsSync et ImpSync.AttenteMinAvtDémarr. La plupart des développeurs n’utiliseront pas cette propriété, mais peuvent en rencontrer en raison de la similitude de leur nom et de la proximité de leur emplacement. ImpSync.TempsSync est égal à ImpSync.TpsRéinitialisation y auquel s’ajoute la valeur que vous saisissez pour ImpSync.AttenteReset. La valeur de ImpSync.TpsRéinitialisation est arrondie à la milliseconde la plus proche. ImpSync.AttenteMinAvtDémarr est la durée entre le moment où l’impulsion de synchronisation est envoyée et le moment où la tâche maître envoie le déclenchement de démarrage. Cette propriété est égale à ImpSync.TpsRéinitialisation si elle n’est pas définie explicitement.
Deux modules à horloge de référence :pour synchroniser deux modules avec horloge de référence à différentes fréquences (comme deux modules DSA), répartissez l’horloge de référence, l’impulsion de synchronisation et l’horloge d’échantillonnage de la tâche maître sur les autres tâches. Remarquez que le nœud Propriété de cadencement NI DAQmx RefClck.src fait référence à la même base de temps maître interne que celle indiquée dans la fiche technique.
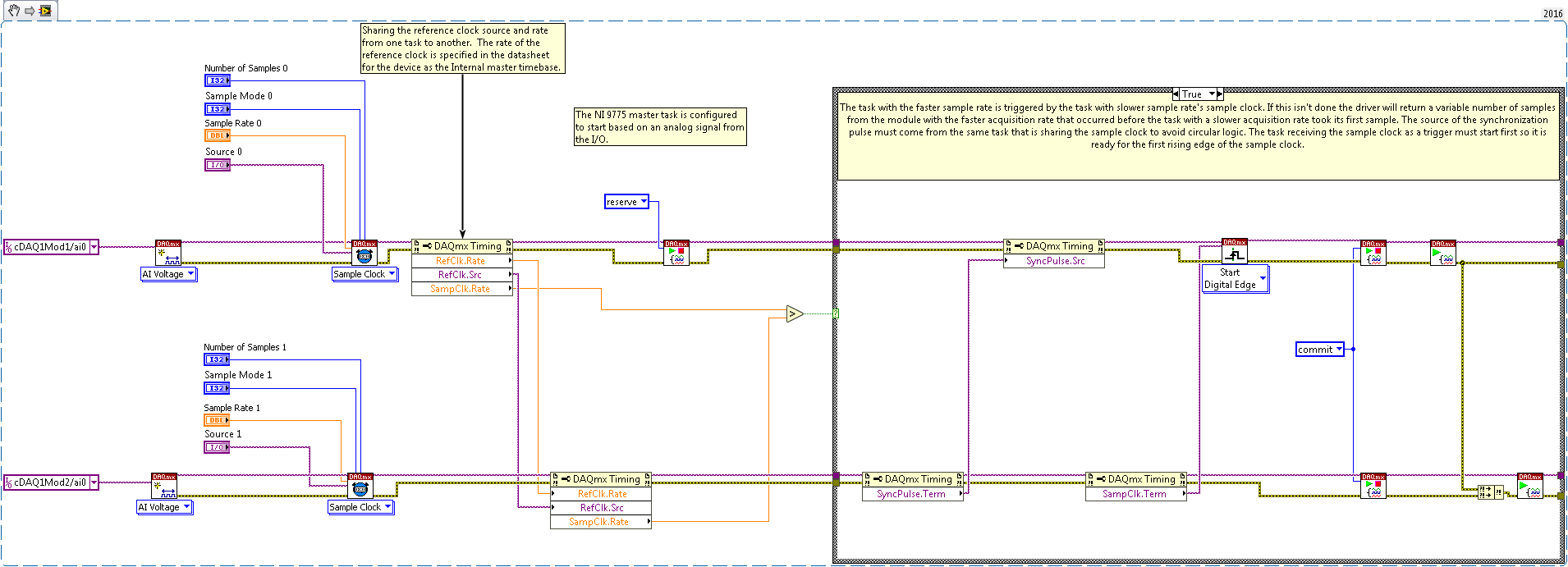
Figure 9 : Synchronisation de deux modules à horloge de référence
Module delta-sigma et module SAR/à échantillonnage lent :pour synchroniser un module delta-sigma et un module SAR/à échantillonnage lent, partagez la base de temps maître et l’horloge d’échantillonnage du module delta-sigma avec le module SAR/à échantillonnage lent. Étant donné que le module SAR/à échantillonnage lent ne peut pas effectuer l’acquisition à 12,8 ou 13,1 MHz, la base de temps maître du delta-sigma est partagée avec la base de temps maître du module SAR/à échantillonnage lent, comme illustré à la figure 10. L’horloge d’échantillonnage d’un module SAR/à échantillonnage lent est généralement dérivée de l’horloge embarquée du châssis ou du contrôleur CompactDAQ. Cette méthode remplace l’horloge du châssis ou du contrôleur par l’horloge 12,8 ou 13,1 MHz du module delta-sigma.
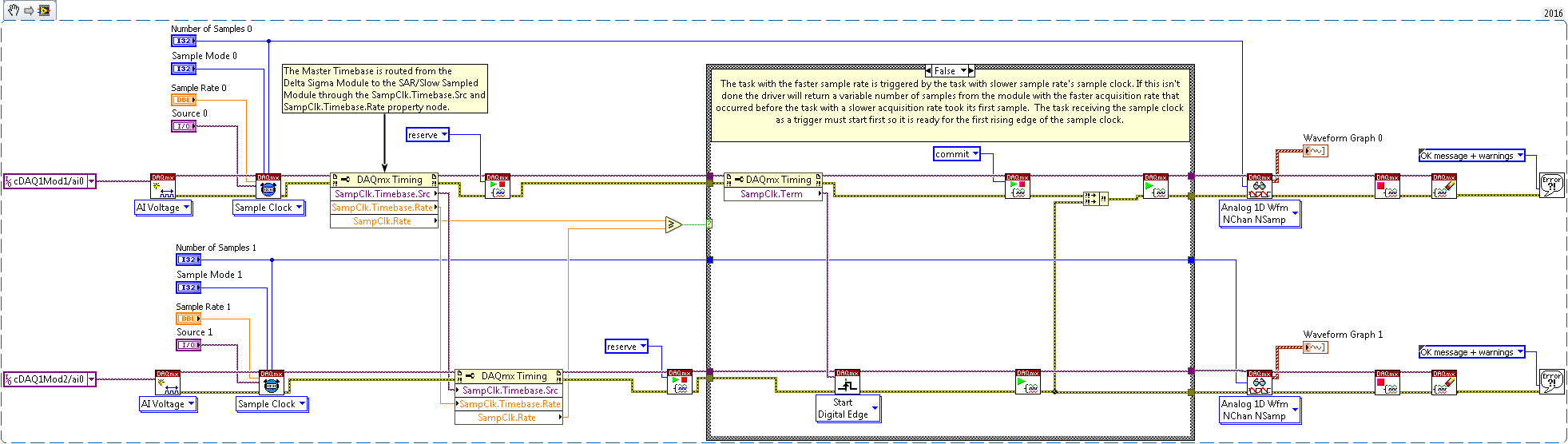
Figure 10 : Synchronisation d’un module delta-sigma et d’un module SAR/à échantillonnage lent
Module à horloge de référence et module SAR/à échantillonnage lent : pour synchroniser un module à horloge de référence et un module SAR/à échantillonnage lent, partagez les horloges de référence et d’échantillonnage du module à horloge de référence avec le module SAR/à échantillonnage lent. Étant donné que le module SAR/à échantillonnage lent ne peut pas effectuer l’acquisition à 12,8 MHz, l’horloge de référence du module à horloge de référence est partagée avec la base de temps maître du module SAR/à échantillonnage lent. L’horloge d’échantillonnage d’un module SAR/à échantillonnage lent est généralement dérivée de l’horloge embarquée du châssis ou du contrôleur CompactDAQ. Cette méthode remplace l’horloge du châssis ou du contrôleur acheminée vers le module SAR/à échantillonnage lent par la base de temps maître interne provenant du module à horloge de référence.
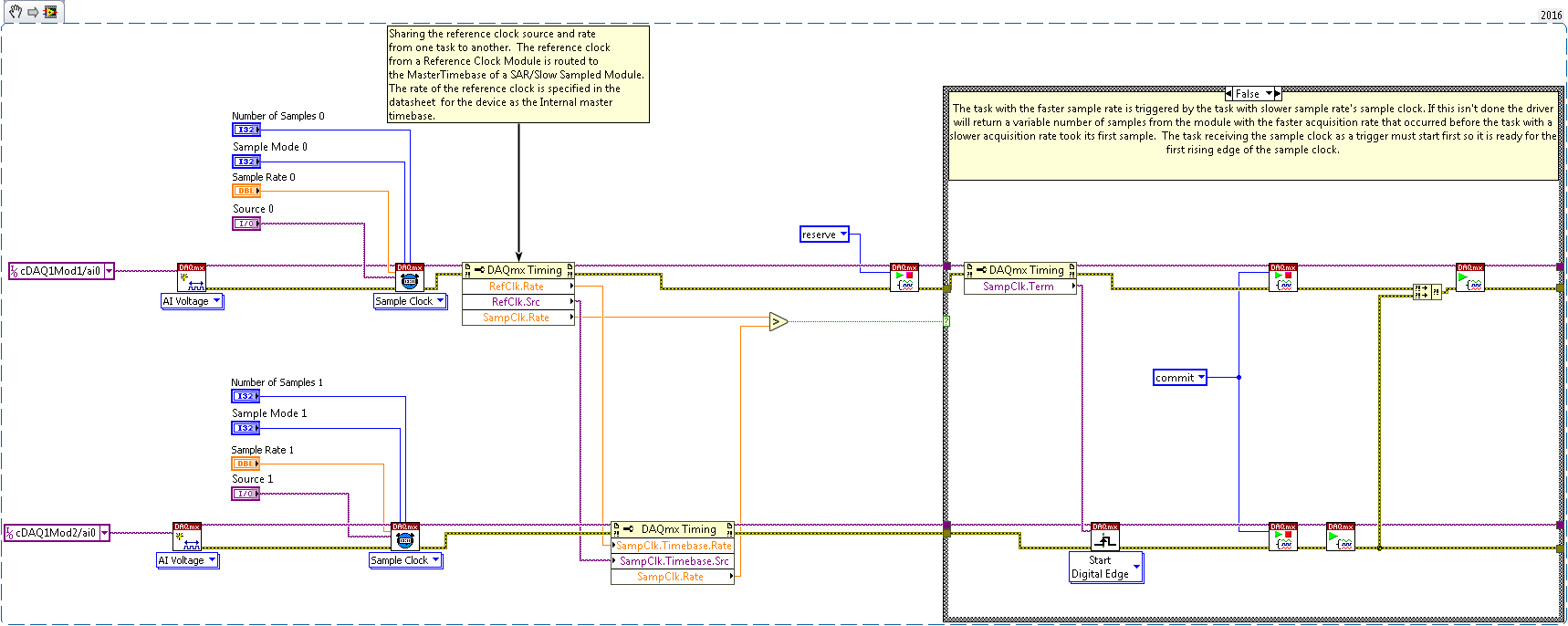
Figure 11 : Synchronisation d’un module à horloge de référence avec un module SAR/à échantillonnage lent
Tâches multichâssis
Certaines applications de mesure nécessitent des mesures mixtes et des systèmes distribués. Dans ce cas, il faut plusieurs châssis ou contrôleurs CompactDAQ. Il existe trois méthodes principales de synchronisation multichâssis.
Synchronisation multichâssis à l’aide de connecteurs BNC/SMB ou de modules numériques : cette méthode de synchronisation entre châssis consiste à utiliser les deux connecteurs BNC situés sur les châssis cDAQ-9178, cDAQ-9188, cDAQ-9188XT et cDAQ-9179, ou sur un connecteur SMB sur les périphériques CDAQ-9132, cDAQ-9133, cDAQ-9134, cDAQ-9135, cDAQ-9136, cDAQ-9137, cDAQ-9185 et cDAQ-9189 pour importer et exporter des signaux de cadencement. Notez que les contrôleurs CompactDAQ sont maintenant obsolètes et ne sont plus disponibles.

Figure 12 : NI cDAQ-9178 avec deux ports BNC peut être utilisé pour importer ou exporter des signaux de synchronisation et de déclenchement.
Il est possible de connecter les terminaux BNC ou SMB de différents châssis pour acheminer des signaux de déclenchement et de cadencement. À l’aide du driver DAQmx, il est possible d’exporter les signaux issus d’une tâche maître en utilisant le NI-DAQmx - Nœud de propriété Exporter un Signal. Sur les tâches (dans un autre châssis), l’horloge d’échantillonnage et le déclenchement de démarrage sont configurés pour utiliser les bornes BNC ou SMB afin d’accepter les signaux.
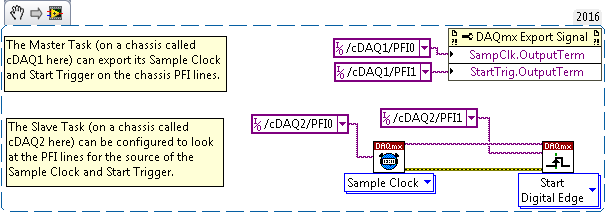
Figure 13 : Configuration des ports BNC sur un châssis CompactDAQ
Les modules d’E/S numériques parallèles/corrélés permettent également de recevoir ou d’envoyer des signaux de déclenchement et de cadencement à travers le châssis. Mieux vaut opter pour ces modules d’E/S numériques lorsqu’il n’y a pas assez de ports BNC ou SMB sur les contrôleurs et les châssis NI Compact DAQ ou lorsque la largeur de bande du signal dépasse celle du connecteur BNC ou SMB (1 MHz).
Synchronisation multichâssis à l’aide du NI 9469 : la méthode ci-dessus de configuration des signaux de synchronisation et de déclenchement à travers les connecteurs BNC du châssis ou un module d’E/S numérique parallèle/corrélé fonctionne pour de nombreuses applications. Cependant, mieux vaut opter pour une autre méthode utilisant le module NI 9469 dans les cas suivants :
- Longue distance entre les châssis
- Large bande passante des signaux exportés
- Topologie complexe de synchronisation
Le module NI 9469 simplifie le routage et le codage du signal et assure la synchronisation avec les modules SAR, à échantillonnage lent, delta-sigma, à entrée et sortie numériques, à sortie analogique dans différentes topologies de châssis. Il est possible de configurer les connexions entre les cartes NI 9469 dans Measurement & Automation Explorer (MAX), comme le montre la figure suivante. Veuillez vous reporter à la section Liens associés à la fin de ce document pour en savoir plus sur la configuration du NI 9469.
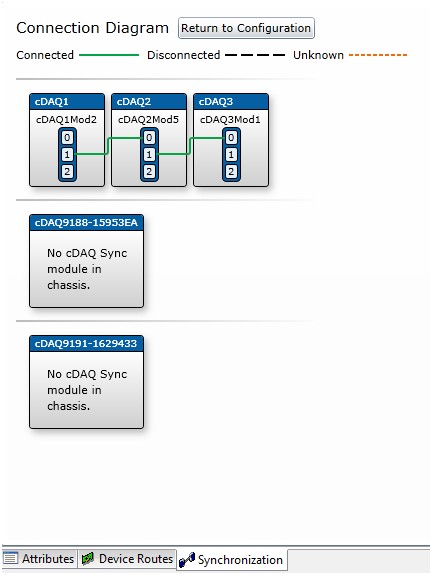
Figure 14 : Configuration de NI 9469 dans Measurement & Automation Explorer
Une fois le NI 9469 configuré dans MAX (à l’aide de NI-DAQmx 9.9 ou d’une version plus récente), vous pouvez ajouter n’importe quel module se trouvant dans des châssis séparés à la même tâche pour simplifier considérablement le code nécessaire à la synchronisation. La figure suivante illustre cette méthode de synchronisation de plusieurs châssis.
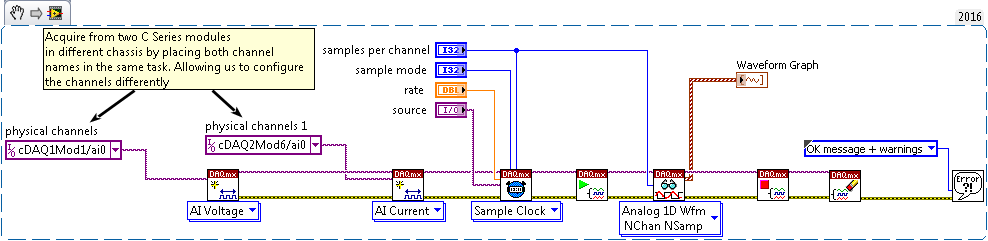
Figure 15 : Code de synchronisation multichâssis avec NI 9469 configuré dans MAX
En arrière-plan, le processus de synchronisation des modules dans les différents châssis est similaire aux méthodes décrites dans les sections Tâches multifréquence et Tâches sur plusieurs périphériques. Il existe une limite pour la synchronisation automatique des modules dans plusieurs châssis à l’aide de cette approche. Elle est d’ailleurs documentée.
Conclusion
Ce tutoriel a présenté plusieurs options de synchronisation. Au départ, les tâches étaient lancées à l’aide de commandes logicielles. Vous pouvez améliorer la synchronisation en partageant un déclenchement matériel entre les tâches et empêcher la dérive entre elles en partageant une horloge d’échantillonnage d’une tâche à l’autre. La synchronisation des modules à la même fréquence simplifie votre programmation en faisant référence à plusieurs modules au sein de la même tâche. Si les modules que vous utilisez requièrent différentes fréquences d’échantillonnage, vous devez tenir compte de considérations particulières en fonction du type de module que vous utilisez. Si les modules utilisés requièrent différentes fréquences, vous devez tenir compte de considérations particulières en fonction du type de module que vous utilisez. Les options décrites ci-dessus illustrent différentes façons de synchroniser des modules de la Série C en fonction des signaux, dans le cadre des exigences de cadencement de nombreuses applications.
Ressources supplémentaires
Modules de la Série C :
- Modules delta-sigma : 9202, 9218, 9225, 9227, 9229, 9230, 9232, 9234, 9235, 9236, 9237, 9238, 9239, 9242, 9244, 9246, 9247, 9250, 9251
- Modules à échantillonnage lent : 9207,9208,9209,9210,9211,9212,9213,9214,9216,9217,9219,9224,9226,9228
- Modules SAR : 9201,9203,9205,9206,9215,9220,9221,9222,9223
- Module à horloge de référence : 9775
- Module de synchronisation de châssis : 9469
- Configuration du NI 9469 dans Measurement & Automation Explorer
- Découvrez 10 fonctions de NI-DAQmx pour maîtriser 80 pour cent des applications d’acquisition de données
- Guide interactif NI CompactDAQ
- Synchronisation temporelle des modules d’entrée analogique de la Série C avec NI-DAQmx dans LabVIEW