Ground Control System Launches Rocket to a Record Altitude of 21.5 km
Radu-Florin Florea, Delft Aerospace Rocket Engineering (DARE)
"We had a fully functional system within four and a half months after the start of development. Furthermore, the ease of programming in LabVIEW reduced the development time even more. Developing a custom solution for the GCS would have taken at least 10–11 months to design, build, and test the equipment and software. By using NI products, we reduced development time by more than 50 percent."
- Radu-Florin Florea, Delft Aerospace Rocket Engineering (DARE)
The Challenge:
Developing a robust and flexible remote ground control system (GCS) to control and monitor the Stratos II+ rocket filling and firing procedures during the engine test campaign and the launch campaign.
The Solution:
Using the flexibility and reliability of CompactRIO and LabVIEW for the time-critical tasks associated with the remote control of the filling and launching of the Stratos II+ rocket, which is powered by one of the biggest hybrid rocket engines ever built by students.
Introduction
Project Stratos was developed by Delft Aerospace Rocket Engineering (DARE), a student society of TU Delft, with the goal of reaching space with a rocket designed, built, and launched entirely by students. As an intermediate step to achieving this goal, we developed the Stratos II+ rocket and launched it to a record-breaking altitude of 21.5 km, setting a new European altitude record for amateur rocketry.
We developed, tested, and integrated a number of subsystems to ensure the successful launch and flight of the Stratos II+ rocket. Our ground control system (GCS), which we based on the CompactRIO platform, was a critical subsystem during the propulsion system test campaign and throughout the Stratos II+ launch campaign. The GCS handles all engine-related operations, such as filling, monitoring, ignition, and more.

Requirements Overview
The Stratos II+ rocket is highly complex. We needed all systems developed to work as reliably as possible to ensure the safety and the success of the mission. There is little room for error in rocket science.
To perform all test and launch operations as safely as possible, we needed a remote system (that is, a GCS). This system should easily communicate with the rocket, gather data (engine pressure information, rocket weight, error messages, and more) about the status of the subsystems, relay this data back to the remote station, all while performing time-critical tasks crucial to the success of the test or launch.
We needed a modular GCS so we could easily adapt or extend it to accommodate any new requirements that might arise. At the same time it must be a robust system, since it would be exposed to extreme environments for rocket launching and testing. Reliability of the GCS is crucial to ensuring a high degree of safety in all conducted operations.

Propulsion System Development
Our Stratos II+ rocket is powered by the DHX-200 Aurora rocket engine, a hybrid propulsion system that uses liquid nitrous oxide as oxidizer to burn solid grain fuel. The Aurora has a peak thrust of 12 kN (enough to lift a car), making it one of, if not the, biggest hybrid engines ever built by students. It is designed to run for 25 s with an average thrust of 8 kN and deliver a total impulse of 180 kN.
Our team performed 14 engine tests with the DHX-200 Aurora over two years, during which we implemented numerous design changes and improvements throughout the tests.
Sensor and Actuator Subsystems
The GCS controls the feed system for the test campaign, which includes controlling seven valves for filling, ignition, main operation, extinguishing, and more.
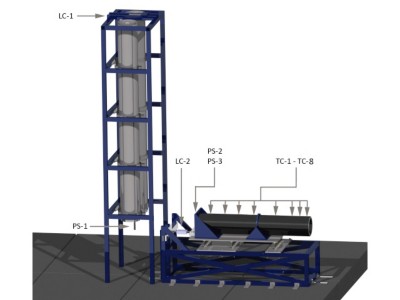
Two load cells gather information on the mass of the oxidizer tanks and the thrust generated by the engine. Pressure sensors measure the oxidizer feed pressure, feed system state, and combustion pressure during engine operation. We sample the load cell and pressure sensors at a high rate so we can detect any instabilities during the engine tests.
Eight thermocouples obtain thermal information on the combustion chamber to detect possible thermal issues during combustion. Relay contact sensors monitor the switching of the relays used in actuator control. We do this to detect any failure that might occur within the actuation subsystem.
Figure 3 shows the location of some of the sensors (thermocouples, load cells, pressure sensors) on the test setup.
Monitoring and Control Software
The monitoring and control software is the part of the GCS that brings everything together to make sure the system meets all conditions for a safe and successful test. We use the software to acquire data from the modules, process it, and perform real-time engine control actions. The software functions include:
Automated preflight/pretest systems check. This operation verifies the full functionality of the engine firing procedure and detects and localizes any actuator malfunctions.
Oxidizer tank filling and pressurization. These operations begin after all systems have been set up and the pad has been cleared of all personnel.
Time-critical engine start-up sequence. To start up the engine, the GCS operator initiates a time-critical sequence that is conducted by the software. The sequence involves squib activation, priming the combustion chamber, and opening the main valve. The engine misfires if any of these steps do not happen within the allowed time frame.
Time-critical run-time engine diagnosis.This operation, performed during engine run time, involves real-time monitoring of the pressure and temperature levels during the propulsion system operation. By processing this data in real time, the software can detect possible engine malfunctions and perform an immediate shut down.
Emergency shutdown sequence. This sequence is performed if an engine malfunctions during operation.
Preparation for the Test Campaign
Having set all the requirements for the new GCS, we started working on the system for the final engine test campaign. We built an entire electrical system around the CompactRIO, focusing on general system robustness.


Outcome of the Test Campaign
Over the span of two years and throughout 14 tests, we worked tirelessly to improve the DHX-200 Aurora. While developing the engine, we encountered and overcame numerous failures, such as chamber thermal failure and combustion instabilities.
Overcoming all the hurdles in the development of the engine was an immense challenge. However, with the last test of the engine, we have handled all problems and the Aurora ran for 23s after which the fuel ran out. This resulted in the chamber rupturing due to its walls being directly exposed to hot flames. This video shows the last test:
Throughout the test campaign, the GCS proved that it is a highly robust and reliable system. This allowed the team to focus on solving the failure modes of the engine, rather than trying to fix faulty circuitry. Furthermore, we could quickly adapt the software to any new requirement. The LabVIEW user interface delivered a good overview of the engine’s status throughout the tests. The team members found it clear, simple, and easy to use.

Stratos II+ Launch Campaign
After we proved the flight readiness of the engine, the Stratos II+ team focused on the launch campaign.
Preparation for the Launch Campaign
We needed to make several adaptions in the overall setup to integrate the variety of subsystems around the launch pad, rocket, and mission control. We had to adapt the GCS hardware and software to communicate with the rocket and perform a different set of tasks than those performed during the test campaign.
Once again, the modular architecture of the CompactRIO proved beneficial. We could implement the hardware changes quickly and without complications.
We extended the software running on the GCS with the DARE proprietary Launch-Box Protocol and a register-like memory map. This made it possible for the system to communicate with all other subsystems and route information through to the control panel. We implemented the protocol over the serial RS232 communication bus using LabVIEW, which allowed a quick and straightforward implementation of the new software.

Rain, Sun, and Fire
The Stratos II+ launch campaign spanned three weeks in October at the Instituto Nacional de Técnica Aerospacial (INTA) base in Mazagón, Spain. Throughout these three weeks, we performed all system and payload testing and integration.
The go for launch was given with all subsystems ready and the rocket set up in the tower. The procedures went smoothly, and we were excited to see the rocket take off and reach 21.5 km! This compilation video shows all launch campaign footage:

The Benefits of CompactRIO and LabVIEW
The reconfigurable I/O (RIO) architecture was beneficial to the entire project. We could make swift changes in the GCS without having to resort to “hacked” solutions. This increased system reliability and increased the team’s confidence in the GCS. The straightforward connection of sensors and actuators to the system allowed more members to work with the system, which reduced issues from faulty connections.
Developing the software in LabVIEW was advantageous since we could develop the monitoring and control software in a short amount of time due to the intuitive graphical programming style. The LabVIEW debugging features helped us, especially when implementing the Launch-Box Protocol, as we could evaluate the message string at every step of its encoding and decoding. Furthermore, we could adapt the user interface at any time, giving us flexibility with the information we wanted to display.

Conclusion
The launch of the Stratos II+ rocket represents a great achievement for the entire team. We gained invaluable experience throughout the project. We developed highly sophisticated systems and conducted propulsion tests and launch operations in a professional manner. This fostered a better understanding of professional life after university.
Having the CompactRIO as the basis for the GCS greatly reduced our development time. We had a fully functional, robust, modular system within four and a half months after the start of development. Furthermore, the ease of programming in LabVIEW reduced the development time even more. Developing a custom solution for the GCS would have taken at least 10–11 months to design, build, and test the equipment and software. By using NI products, we reduced development time by more than 50 percent.
Using CompactRIO and LabVIEW reduced implementation issues. The team could focus on improving the design of the rocket and the efficiency of the propulsion system, analyzing the data, and more. This empowered us to become better engineers.
Project Stratos has been an incredible and unforgettable experience. Figure 10 shows the Stratos II+ team.
Author Information:
Radu-Florin Florea
Delft Aerospace Rocket Engineering (DARE)
Stevinweg 1
Delft 2628 CN
Netherlands
radu.florin.florea@gmail.com