ImagingLab Robotics Library for DENSO 參考指南
綜覽
內容
介紹
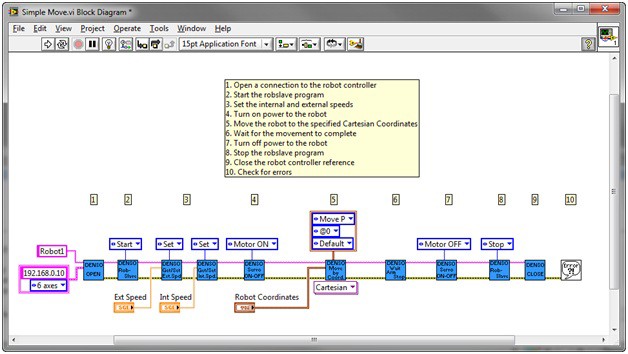
此參考指南將以範例為起點,介紹 ImagingLab Robotics Library for DENSO 的相關概念,協助使用者設計自己的 DENSO 機器人與機器視覺導向系統。並了解 ImagingLab Robotics Library for DENSO 的使用方法,還有單點運動、混合運動,與機器視覺導向的應用。DENSO 機器人可透過教學模式 (Teaching pendant) 進行操作,且大部分均取自於範例程式碼。並請注意,此參考指南為可設定的範例,而非實作應用;因此並未包含 ImagingLab Robotics Library 或 DENSO 機器人的所有概念。若要開發完整的機器人系統,請洽 NI 聯盟夥伴 (NI Partner) 進行諮詢。
設定自己的系統
Robslave
若要將機器人轉為可用 NI LabVIEW 軟體控制的從屬狀態 (Slave state),則應載入並啟動「robslave.pac」的 DENSO 程式;此程式已隨附於機器人控制器中的 DENSO b-CAP 軟體。透過 DENSO 軟體,即可將 robslave.pac 下載至控制器。在連接控制器之後,可使用 Denso-Robslave VI 啟動程式,並於退出 LabVIEW 應用時停止該程式。
進行乙太網路控制作業
LabVIEW 的所有機器人指令,均透過乙太網路傳送至機器人控制器中。機器人控制器僅接受單一 IP 位址,因此必須將之視為有效用戶端以新增至控制器。在教學模式 (Teaching pendant) 中,可點選 Settings» Communications Setting» Client。透過此功能表,即可變更 IP 位址,使其對應至已連接機器人的電腦或 Real-Time 裝置。亦可透過乙太網路讓機器人接收指令。可於教學模式中點選 Settings» Communications Setting» Ext Run,並選擇 Ethernet 做為執行程式的通訊埠。乙太網路埠亦必須透過 Settings» Communications Setting» Permit,使其具備 Read/Write 許可。
接線作業
若要透過 LabVIEW 控制 DENSO 機器人,則必須將教學模式轉為「Auto」,並開啟 Safety I/O 埠上的 Enable Auto 線路。此外,「DENSO 控制器上,min-I/O 的 Stop all Steps 輸入」或「Step-Stop 線路」,亦必須連接 24 V 電源供應。此 24 V 電源供應可外接;或可變更控制器的跳線 (Jumper),以於內部供應 24 V。請參閱 DENSO 使用者手冊以獲得更多資訊。
初始化
連接機器人控制器
在進行 DENSO 機器人應用的第一個程式設計步驟,即是機器人與其參數的初始化作業。使用 Denso-Open VI 即可連接機器人控制器,並指定控制器的 IP 位址與機器人的軸線數量。若要查明機器人控制器的 IP 位址,可於 DENSO 教學模式中點選 Settings» Communications Settings» Address。請注意,使用者必須將電腦或 Real-Time 系統的 IP 位址加入機器人控制器,使其成為上述機器人通訊設定功能表中的有效用戶端。Denso-Open VI 的軸線數量可選擇為 6、5、4,與 Undefined。若機器人具備的軸線數量均相同,則不需另外區分不同的模型。舉例來說,VP 系列 6 軸式機器人,亦可執行專為 VS 系列 6 軸式機器人所撰寫的程式,而不需更改任何 LabVIEW 程式碼。
設定速度
LabVIEW 可設定 2 組不同的機器人速度類型:內部速度與外部速度。在佈署完成之後,外部速度往往均用以控制運動之間的變數。舉例來說,機器人可能慢速移動以組裝零件,但隨即轉頭以高速拾取其他零件。從「機器人安裝零件之後」到「拾取下 1 組零件」中間,將呼叫外部速度 VI 並設定目前所需的速度。內部速度一般均用於測試。若必須以 25% 的速度完成測試作業,則可將內部速度設定為 25,則機器人運動的所有速度均將調整為原速度的 25%。或者亦可進入程式碼,將各個速度均設定為原始值的 25%。由於某些應用可能針對不同的運動,具備多項速度設定值,因此個別調整可能極為耗時費力。就安全考量來說,啟動 robslave.pac 之後再設定內部與外部速度,則可確保機器人以正確速度移動。
Power On/Off
在連接機器人控制器之後,必須呼叫 Denso – Servo – Set ON-OFF VI 才會開啟電源。在傳送運動指令,並將馬達狀態輸入更改為 Motor Off 之後,再呼叫此 VI 並將馬達狀態輸入設定為 Motor On,整個運動作業才算完成。
作業工具
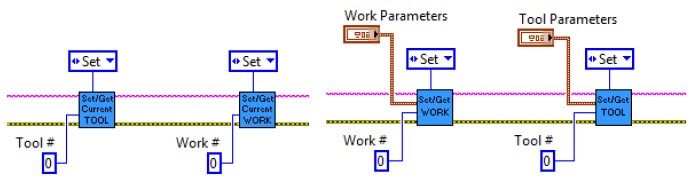
透過 DENSO 機器人,即可針對附掛於機器人末端的現有工具 (或稱 End-affecter) 進行設定。此功能不需完全改變已程式設計完畢的位置,即可變更 End-affecter。此功能亦可根據 End-affecter 所使用的參數自動偏移運動,以達到相同的目標位置。當使用 Cartesian 與 Trans 座標對機器人下達指令時,則座標系統 - 或稱作業範圍 (Work area) - 將可定義絕對位置 (Absolute position)。ImagingLab Robotics Library for DENSO 可讓使用者設定並編輯現有工具與作業範圍,亦可透過下圖所顯示 VI 新增工具與作業範圍。這些截圖則針對特定工具/作業,說明現有工具/作業與新數值的設定方式;但使用者亦可從「Set to Get」變更輸入值,並回傳現有數值與設定。
下一步
接著參閱其他技術文件,以了解應如何使用 ImaginaLab Robotics Library for DENSO 進行單點運動的程式設計。