消除 ADAS/AD 相機驗證的重要落差
綜覽
由於相機架構式先進駕駛輔助系統 (ADAS) 內建的安全機制,因此難以測試其量產版軟體。為通過受測裝置的有效性檢查,並且激發類似於試駕的行為,NI 提供專用軟硬體,能分 3 個不同的層級模擬影像感測器功能,不需使用專用測試模式軟體進行驗證 (也就是 HIL 模式)。
內容
ADAS 相機驗證為何不簡單
視覺架構的先進駕駛輔助系統是現代車輛不可或缺的一部分,對於車輛在可見電磁波譜中的視野也能發揮輔助作用。這類系統提供重要的自主功能,以根據物體偵測與分類為準的自動車輛軌跡規劃提升道路安全性。許多 ADAS 電子控制器 (ECU) 的核心,都是以感測輸入推論而來的 ASIC 加速神經網路 (NN)。運用範圍最廣的其中一種晶片組由 Mobileye Global, Inc. 生產,適用於這類 NN 架構子系統。
對汽車製造商及供應商來說,這類系統的驗證與認證流程會是全新的挑戰。如採用傳統的品質保證方法,唯有測試能夠確實運用於 NN 架構的 ADAS ECU 並發揮成效。車輛量產前的測試階段,在投資當中佔了相當大的比重。 由於經濟與可重複性使然,常見方法之一是在實驗室環境中進行功能測試,模擬車輛匯流排的其他部分時,在硬體迴圈 (HIL) 配置中採用相關 ECU 叢集。之後再透過數位路徑,將感測器激源注入於 ECU。
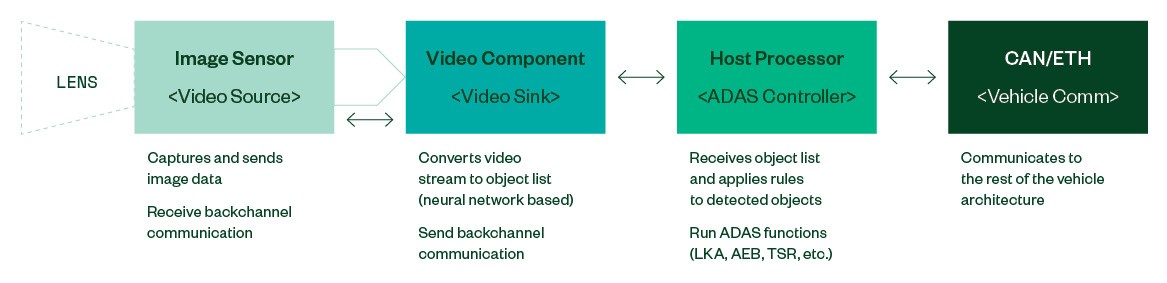
圖 1: ADAS 相機系統的典型架構 (簡化版)
負責重要安全車輛功能的 ADAS ECU 必須能夠自主診斷故障,還要能以安全 (防呆) 的方式讓出車輛控制權。 因此,視覺 ECU 必須即時觀察影像感測器運作狀態,以及檢驗所提供的串流影片。
現代的影像感測器提供多種方式,力求確實避免感測器與下游影片處理器之間的資料路徑出錯:某些製造商支援旁路交易使用 CRC 檢查碼。只要設定串流影片,影像內容就能同時包括即時計數器和設定狀態快照。某些感測器內建 Error 中斷輸出腳。MIPI CSI2 規格另外在協定層級提供 CRC 防護與影片片格計數器。
全自駕車採用這些及其他防護措施,能迅速將控制權讓予駕駛者,避免影像路徑出錯而導致軌跡重複。因此,只要將串流影片或之前的錄影畫面輸入到 ECU 中,就能觸發防呆機制。
這是一項從一開始就眾所皆知的挑戰,而最顯而易見的解決辦法就是徹底關閉 ECU 軟體的狀態監控與狀態驗證。 這個狀態就是所謂的視覺 ECU「HIL-模式」,Mobileye 及 Bosch 或 Continental 等其他廠商也提供支援。這是測試感知層及應用程式軟體的有效機制,但受測的軟體版本並非日後預定在現場部署的軟體,這就是這種方法免不了的缺點。因此,驗證測試無法顧及唯有量產軟體才能做到的完整測試範圍。
要解決這個問題,解決方案之一是進行逆向工程,以及即時模擬影像感測器的行為,以便進行量產版的 ECU 軟體測試。
如何使用 ECU 發行版軟體進行 ADAS 相機驗證
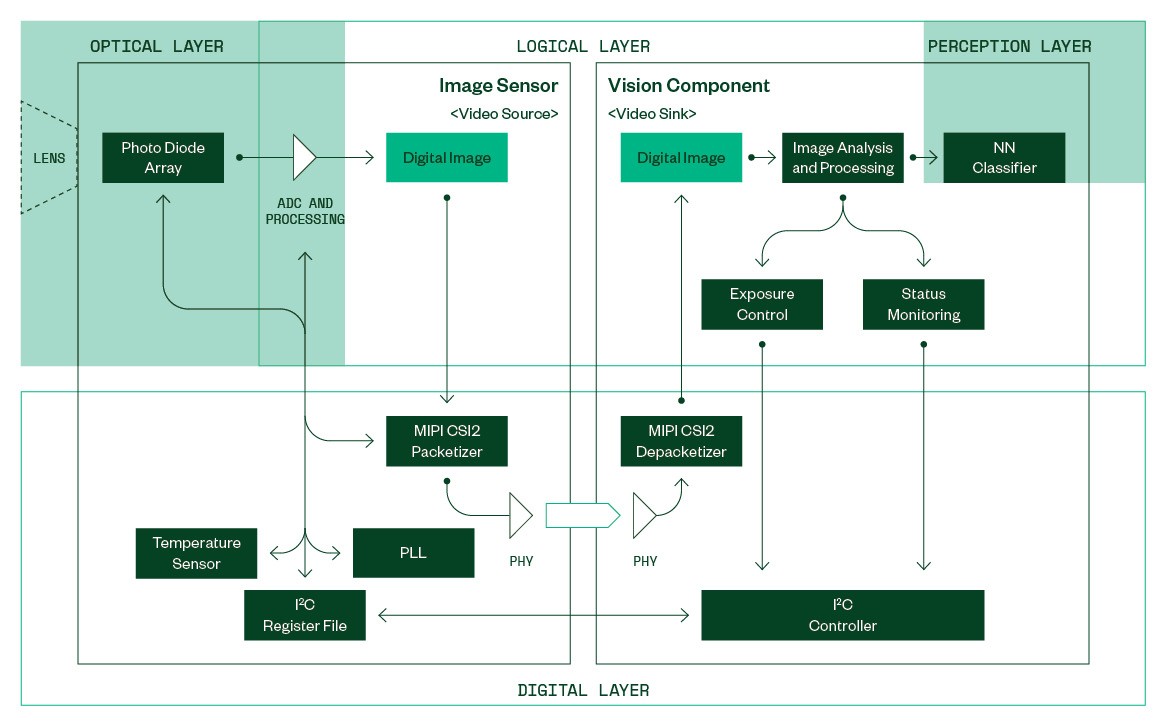
圖 2: 影像感測器與下游視覺元件簡圖
圖 2 是以影像感測器為影片來源,以連線視覺元件為影像接收器的簡化版概念模型。在邏輯層級,是由影像感測器產生影像,再提供給視覺元件使用。
將傳入的影像轉傳到感知層之前,會逐一進行影像分析。 此時會將平均亮度、直方圖等具體的影像屬性輸入到負責調整影像感測器的控制模組中,以利產生適用於物件分類且適度曝光的影像。
狀態監控會擷取有效計數器,並自影像中的嵌入資料擷取資訊,用於驗證感測器的設定狀態。 倘若使用這個模組而未使用包括 ECU「HIL-模式」在內的測試版軟體,要在 HIL 環境中將任何一般串流影像輸入至 ECU 都會相當困難。
注入系統需要即時模擬多個感測器子元件的行為,才能避免觸發視覺元件中的防呆機制,並且產生可靠的偵測效能測試結果。
光學層模擬屬於產生感測器輸入資料之主機電腦的領域。在開迴路迴歸測試中,會透過 DUT 重播之前的錄影內容,這個內容是以類似的相機 ECU 拍攝的。使用視覺化工具產生即時綜合資料後,就能進行情境開發閉迴路測試、功能測試以及效能測試。此時產生的資料,其品質會與光學感測器模型的精確度息息相關。
圖 3 顯示合成模擬通常會包含,只是程度不同的光學屬性。

圖 3: 對光電路徑的影響
在邏輯層上,大部分的模擬作業通常會以線上數位影像操作為主。有些視覺系統可能會讓感測器動態剪裁影像,並將測讀視窗設置於有效像素陣列。附彩色濾波器的感測器能提供獨立色彩通道放大功能,適用於在不同照明環境中調整白平衡。
入射光的強度有時可能會超過光電二極體容量,以利擷取情境的整個動態範圍,在夜間尤其如此。為擴大能擷取到的動態範圍,現代的感測器能在曝光時進行多次類比數位轉換。每次轉換均會產生 12 位元的亮度資訊,之後在內部堆疊成最終的 20 位元數位影像。為節省頻寬,接下來可再利用可以動態設定的非線性傳輸函式,將 20 位元的影像壓縮成 12 位元或 16 位元。
下游處理器可能要依賴感測器提供的影像統計資料,才能正確控制曝光時間。影像感測器處理影像輸出時,可以產生能夠動態設定的直方圖。
數位層由低階協定與電子參數決定。這些項目同樣決定 ECU 介面的 PCB 設計,但感測器內部的相關設定參數則包含 MIPI SCSI-2 通訊模組的線上設定,以及鎖相迴路 (phase-lock loop, PLL) 產生的時脈率,最終驅動輸出畫面影格率。 另外亦須提供合理的暫存器檔案輸出,例如溫度感測器和狀態訊號資料解析。
即時嵌入式系統的設計時序限制 (延遲與產能) 相當緊湊,建立儀控介面時必須遵守這些限制。除了在功能方面模擬影像感測器之外,亦須在受測目標裝置的時序限制內迅速回應需求,並且提供資料串流。
NI 的解決方案組合概括前述所有主題,能提供可自訂的模組化 ADAS/AD ECU 測試系統 (圖 4)。
NI 還能運用強大的合作夥伴網,提供客製化的儀控介面,適用於整合度最高的 ECU。
影像感測器模擬 IP 的即時核心是在專屬的高效能可擴充硬體平台上實作,能平行提供多個 UHD 串流影片,因應現代車輛視覺系統的需求。此外,模擬核心能在各種處理階段中插入故障,以利測試 DUT 的錯誤處理機制。
在模擬方面,NI 硬體可以透過雙向高頻寬 RDMA over Convered Ethernet 資料連結連接第三方軟體模擬功能,提供擴充能力與開放性。只要調整 HDMI 資料源,就能與選用的第三方模擬工具相容。
結論
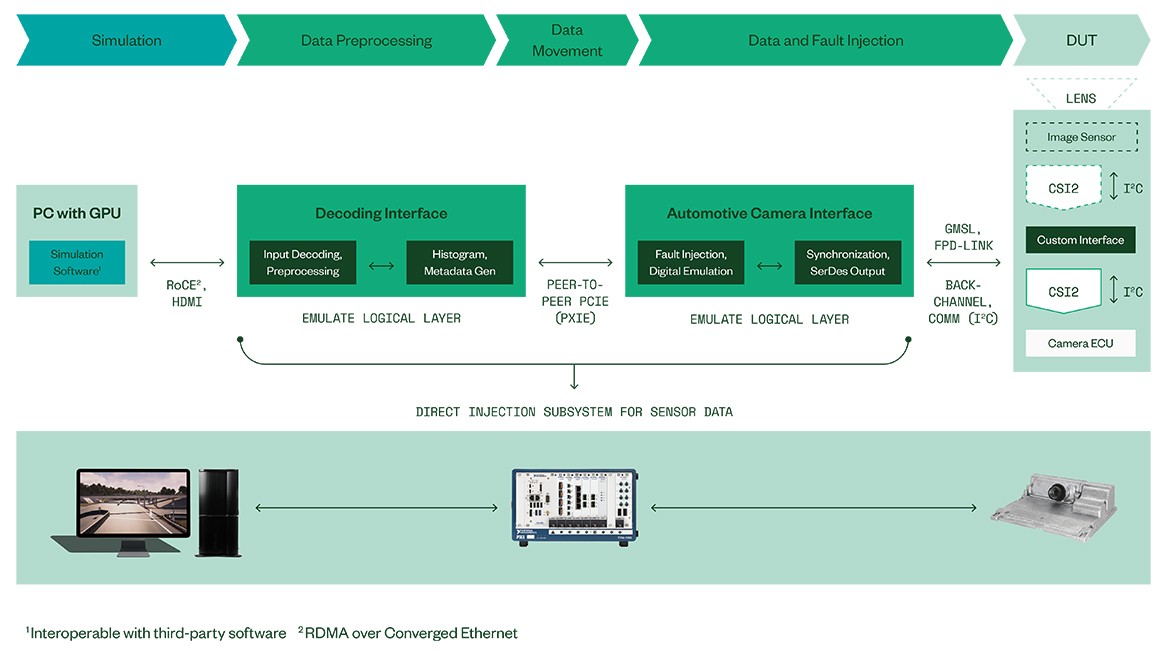
圖 4: NI HIL 系統架構,可使用量產版 ECU 軟體直接注入資料
總而言之,ADAS ECU 是相當重視安全的系統,會採用狀態監控防護措施,因此無法輕而易舉地注入影像。必須使用精密的多層次即時影像感測器模擬模型,才能通過 ECU 的有效性檢查,也才能產生串流影片,讓感測層有類似實際測試駕駛的行為。
NI 適用於影像感測器的精密光學模擬與即時模擬功能,可針對全球範圍內現階段與未來的視覺架構 ADAS/AD ECU 進行全面驗證。NI 解決方案支援根據視覺 ECU 量產軟體進行驗證測試,因此能以測試版軟體消弭自「HIL 模式」上市以來在適用範圍方面的缺口。