ADAS/AD検証の革新:ValeoとNIにおけるHILアーキテクチャの進化
ユーザ事例のハイライト
- HILシステムの進化は、新しい技術の進化する要件を満たし、路上での車両の安全性という目標を達成するために不可欠です。
- ValeoのDVSチームは、複雑化するADAS/ADに対応するため、それぞれ独自の機能を備えた3つのHILアーキテクチャを使用してきました。
- NIとValeo社の提携により、標準化されたNI PXIシステムを使用したADAS検証が促進され、ダイナミックな自動車業界でOEMの満足度を高めます。

「Valeoでは、常に困難なADAS検証要件を満たすためには、スキル、ソフトウェア/ハードウェアの整合性、プラットフォームの一貫性が重要であると考えています。NIとNI PXIプラットフォームは、業界の課題に対応し、お客様の期待に応え続けるために必要なものを提供してくれると確信しています」
―Valeo社、ソフトウェアツール開発チームリーダー、Martin Zmrhal
課題
ADASとADシステムはますます複雑化しており、従来のHILアーキテクチャでは業界のニーズを満たすことができなくなっています。Valeoは、現在および将来のニーズを満たすために必要なパフォーマンス、確度、拡張性を提供できるHILシステムを必要としていました。
ソリューション
ValeoのDVSチームは、NI PXIプラットフォームとRDMAテクノロジをベースにしたNIの新しいHILアーキテクチャを使用しました。新しいアーキテクチャは、標準化、パフォーマンス、確度を提供し、ADAS/ADシステムの安全性と信頼性を確保しながら、HILシステムをより迅速かつ効率的に開発およびデプロイできるようにします。
モビリティ革命の中心
人間運転手を高度な自動システムに置き換えることで、生産性の向上、快適性の向上、道路での交通事故の減少が期待できます。ただし、この野心的な目標には、特にシステム障害と安全性という重要な問題に関連する課題や懸念事項があります。より高いレベルの車両オートメーションを実現するには、無限に近い現実世界のシナリオに対する包括的なテストが必要です。
この課題に対処するために、自動車会社は継続的に技術と検証テスト方法の開発に努めています。そのような企業の1つに、自動車技術ソリューションの世界的リーダーであるValeo社があります。Valeo社は、電動化、先進運転支援システム (ADAS)、自動運転 (AD) の分野で先駆的な役割を果たしてきました。Valeo社とNIの提携は、革新の伝統と最先端のソリューションを提供するという取り組みにより、より安全な未来に向けて継続的に進化しています。
ADASと自動駐車 (AP) の概要
ADASシステムが複雑化するにつれて、これらのシステムを実車のみでテストすることがますます困難になっています。仮想検証は業界のトレンドであり、テスト時間とコストを削減し、現実世界の条件では困難な極端なシナリオをテストする機能の必要性によって推進されています。
この課題は、センサフュージョンを使用して車両周辺の仮想マップを作成し、自動駐車操作を可能にするAPシステムに特に当てはまります。これらのシステムの複雑さを考慮すると、ソフトウェアリリースごとに何千ものテストケースを含む広範な検証が必要です。ただし、市販前に対象の車両でシステム全体をテストすることは、車両が入手不可能であるため不可能な場合がよくあります。
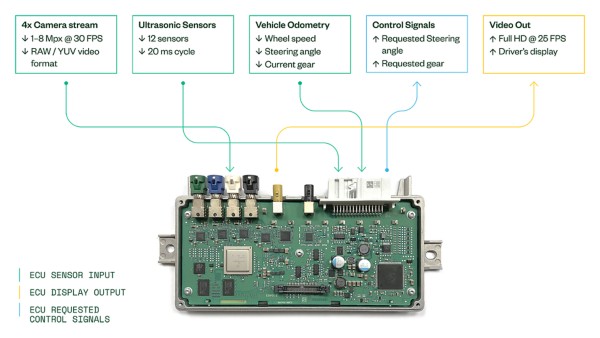
図1: Valeo自動駐車ECUアーキテクチャ
この課題を解決するために、Valeoの運転ビジョンシステム (DVS) チームは、開ループおよび閉ループのHIL (Hardware-In-the-Loop) 技術に基づいた包括的なテストアプローチを使用しています。この方法では、ラボ環境内の専用テストベンチを使用して、車両外部の電子制御ユニット (ECU) で実行するソフトウェアのテストを実行します。
- 開ループリプレイHIL―この方法では、事前に記録された実際の道路データをECUに挿入します。主にコンピュータビジョンアルゴリズムと検出率のテストに使用されます。
- 閉ループ仮想HIL―合成センサデータが生成され、ECUに入力されます。この設定により、ECUからのフィードバックが可能になり、車両の動作を正確にシミュレートできます。
車載テストは現実世界のダイナミクスと環境を提供しますが、費用と時間がかかり、さまざまな制約を受けます。一方、仮想HILテストは、スケーラビリティ、自動化、コスト効率の点で利点がありますが、現実世界シナリオの現実性に欠けています。シミュレーション環境の忠実性が高まるほど、HILテストが現実に近づくことに注意してください。
Valeo DVSの役割
Valeo DVSは、魚眼レンズ付きの車載カメラ、超音波センサ、ECUを使用して、車両用のサラウンドビューシステムを開発する上で重要な役割を果たしています。これらのシステムは、APおよびドライバ支援機能の一部です。Valeoのテストツールおよびインフラストラクチャチームは、R&D設計から車載記録、HILテスト、製造における最終品質検査 (EOL) テストまで、製品開発ライフサイクル全体で検証ツールを提供する責任を負っています。
ADAS/AD検証におけるHILアーキテクチャの進化
この分野のダイナミックな状況が、HILアーキテクチャの継続的な進化を推進してきました。これらのシステムは業界の進化するニーズを満たすように適応しており、新しい技術の進歩と、拡大し続ける要件の最前線にあり続けることができます。
現在、Valeo DVSチームは、NIと共同開発した3つの異なるHILアーキテクチャを使用しており、それぞれ独自のテスト機能を提供しています。
マルチシステム拡張インタフェース (MXI) ベースのHIL
Valeo DVSチームによって開発されたこの第1世代のHILシステムはValeoのセンサセットに合わせて調整された、Vosstrexと呼ばれる社内シミュレーションエンジンを使用しています。このシステムは、魚眼カメラと超音波センサのモデルのセットで構成されており、WindowsベースのシミュレーションPCからNI PXIシステムとECUに合成データを送信します。
特にカメラセンサでは、シミュレーションエンジンからの合成データをレンダリングします。データは、MXI Expressを使用して、プロセス間通信を介してLabVIEWアプリケーションからNI PXIシステムに渡されます。PXIシステムでは、FlexRIO FPGAはソフトウェアとハードウェア間のインタフェースとして機能し、本物のカメラ信号と低レベルデータをエミュレートしてECUに渡します。
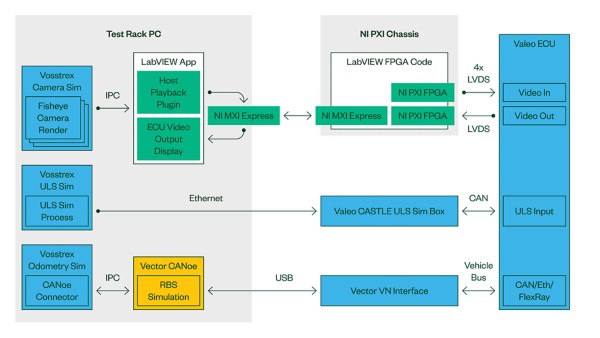
図2: 閉ループMXIベースのHILアーキテクチャ図
このアーキテクチャは、駐車などの低速操作を含む主要なユースケースに効果的に対応し、特定のニーズに適しています。さらに、Vosstrexシミュレーションは、十分な視覚的忠実度を提供すると同時に、さらなる強化のための確固たる基盤を提供します。
ただし、このアーキテクチャには特定の課題があります。主な課題は、MXIインタフェースのスループット制限であり、データ転送レートが制限されます。さらに、カメラ、超音波データ、車両メトリックという3つの主要コンポーネント間で時間の同期がないことが、制限を追加しています。これらの課題にもかかわらず、システムは意図した低速アプリケーションに対して機能し続け、サードパーティのシミュレーションエンジンの進歩により、将来的にはさらに現実的なシミュレーションの機会を提供します。
現在、Valeoは世界中の9つのValeo施設をサポートする約50名のHILテスタを擁し、12以上のOEMプロジェクトでテストを行っています。このHILシステムは、プロジェクトの初期段階でシステム検証フレームワークを確立するのに役立ち、ソースコードの完全な所有権はValeoに渡されます。LabVIEWの開発機能によって、プロジェクトの進化に合わせて、FPGA実装やシミュレーションエンジンを含むシステム全体を継続的に改善できます。

図3:ValeoサイトのHILファーム
HDMIベースのHIL
MXIベースのHILアーキテクチャシステムを進化させる必要性は、ヨーロッパのプレミアムOEMからの要求によるものでした。要件の一部は、12台の高メガピクセルカメラをシミュレートし (以前のシステムの4倍の帯域幅)、Linux上で動作する2つの異なるシミュレーションエンジンを使用することでした。Valeo社はNIとの協力により、これらの基準を満たすソリューションを構築しました。
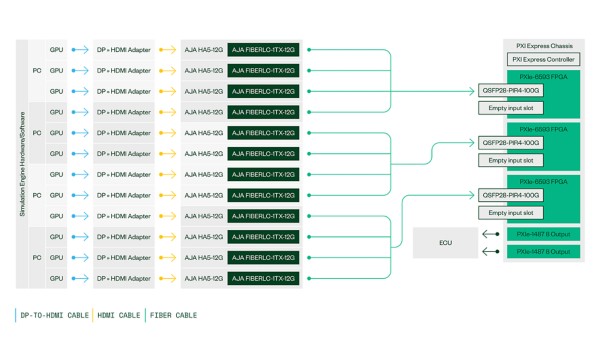
図4: 12台のカメラシミュレーションアーキテクチャ
図4の構成では、4台のPCと12基のグラフィックスカードを使用し、各GPUは個別のカメラのシミュレーション専用となっています。LinuxベースのPCでシミュレーションを実行し、12台のカメラのそれぞれでカメラセンサモデルを実行します。物理的なGPU出力は、HDMI接続を使用してPXI FPGAに接続され、この伝送パスでいくつかの変換が行われます。具体的には、HDMIからシリアルデジタルインタフェース (SDI) への最初の変換と、それに続くSDIからMIPI CSIへの変換が含まれます。この変換プロセスを容易にするために、追加のFPGAがワークフローに導入されます。これらの変換が完了すると、データはFPD-Link III (PXIe-1486) およびGMSL2 (PXIe-1487) の車載ビデオインタフェースに入力され、FPGAはECUへの入力として機能するセンサ信号をエミュレートする重要なソフトウェア・ハードウェア間インタフェースとして機能します。

図5: HDMIベースのカメラセンサシミュレーション
帯域幅に関しては、システムは毎秒4.5ギガバイトのレートで動作し、ビデオデータをECUに送ります。この設定の顕著な利点の1つは、シミュレーションに依存しないことです。この場合、Linuxベースのシミュレーションエンジンが使用されていますが、同じデータパスで他のシミュレーションプロバイダからのデータをサポートできます。HDMIからSDIへの変換に必要なFPGAを追加することでコストが増加しますが、この新しいデータパスで画像データをさらに処理する機能も追加されます。
ただし、この構成には一定の制限があります。まず、HDMIインタフェースには課題があり、HDMIからSDI、さらにCSIへの移行にはかなり複雑な変換ツールチェーンが必要です。最終的には、カメラデータと超音波または追加の車両バスシミュレーションの間の同期がないという、以前のセットアップと同様の制限があります。最も重要なことは、このHILシステムは開ループのリプレイHILとして効果的に使用できないため、GPUを使用して事前キャプチャされたデータをリプレイするのに不向きであるということです。
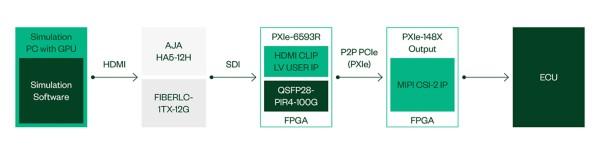
図6: ビデオインジェクションパイプラインアーキテクチャ
RDMAベースのHIL
NIが提供する最新世代は、RoCE (RDMA over Converged Ethernet, コンバージドイーサネットを介したリモートダイレクトメモリアクセス) を使用したRDMA HILシステムと呼ばれるものです。このシステムは、ホストPCとNI PXI間のシームレスなデータ交換に採用されるインタフェースであるRDMAに基づいて構築されています。RDMAはイーサネットベースの接続を確立し、低レイテンシ、高帯域幅でのビデオデータ転送を容易にし、コンピュータメモリとPXIリアルタイムコントローラメモリ間のダイレクトリンクを有効にすることでメモリコピーが不要になります。高レベルのアーキテクチャの観点から見ると、データフローはシミュレーションPCから始まり、RDMAを介してECUへの送信を担当する必要なFPGAを収容するPXIシャーシ内にあるPXIリアルタイムコントローラに送信されます。このシステムは、開ループおよび閉ループ構成として動作することができ、事前キャプチャされたデータのリプレイとフィードバックをリアルタイムコントローラに統合することができます。
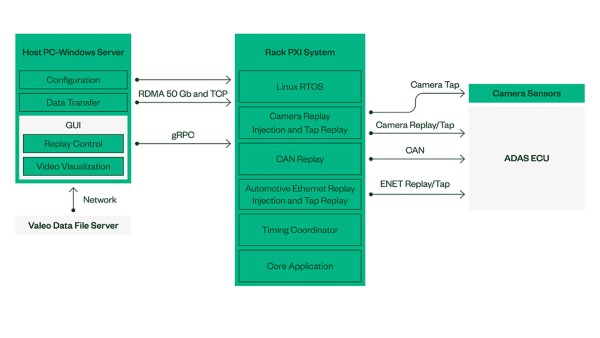
図7: RDMA開ループリプレイHIL
このアーキテクチャは、これまでで最高のスループット性能を提供し、単一のRDMAモジュールで最大6.25ギガバイト/秒のデータ転送が可能です。もう1つの重要な利点は、開ループと閉ループの両方のHILセットアップの統一されたアーキテクチャにあり、その違いは主にデータソースの選択 (データソースがストレージファイルからのものであるかシミュレーションからのものであるか) に関連しており、再利用性を可能にします。ただし、主な利点は、ビデオデータを車両バス信号とシームレスに整合させる正確な同期メカニズムの導入にあります。この同期は、カメラだけでなくさまざまなセンサをカバーし、包括的で同期されたデータセットを提供します。たとえば、Valeo社はこれらのHILシステムの組み込みを積極的に評価しており、将来の戦略の一環として既存のMXI HILを置き換える可能性があります。
ただし、RDMAを使用する際に考慮すべき点がいくつかあります。シミュレーションエンジンは、シミュレーションエンジンからRDMAクライアントライブラリDLLを呼び出す必要があるRDMAと互換性がある必要があります。外部DLLをシミュレーションエンジンに統合できない場合は、HDMI-RDMA変換器を使用することもできます。この方法は基本的に、以前の構成の要素を組み合わせたハイブリッド設定が作成されますが、追加の変換ステップ (HDMIからRDMA) により、追加のレイテンシとジッタが発生するという注意点があります。
包括的ソリューション: NI ADソフトウェア開発キット (SDK)
NI RDMAベースのHILシステムは、シミュレータに依存しないように設計されており、すべてのお客様の要件に対応します。この汎用性は、NI ADソフトウェア開発キット (SDK) を使用することで可能になります。 SDKは、センサのバスエミュレーションとシミュレーションソフトウェア間の迅速な統合を促進します。提供されているAD SDKは、一貫したインタフェースを提供するプラグインのセットであり、シミュレータプロバイダとAD HILシステム間の統合を簡素化します。LabVIEWとgRPCサポートを活用して、SDKはシミュレーションAPIを提供し、シームレスな統合のための明確なインタフェースを提供します。このアプローチにより、サードパーティシミュレータ会社は使い慣れたツールで作業できるため、デバッグやCI/CDプロセスをサポートする簡単なテストポイントを作成できます。これにより、シミュレーションソフトウェアとADAS HILシステム間のシステム通信の複雑さが軽減され、エンドユーザはどのシミュレータプロバイダを利用するかを選択できるようになります。
NIとValeo社の提携
NIとValeo社の提携は、研究開発における協力、NIプロトタイプへの早期アクセス、エンジニアリングサービス、ターンキーHILシステム開発で構成されています。この提携により、Valeo社はADAS検証の最前線に立つことができました。
NI PXIプラットフォームにより、Valeoのチームは世界中で標準化された検証システムを実現し、プラットフォームが提供するモジュール性、正確な時間同期、重要な自動車インタフェースのサポートを利用してテストコンポーネントを再利用できるようになりました。
まとめ
NIとの提携で行われたValeo社でのHILシステムの進化は、ますます複雑化するADAS/ADシステムがもたらす課題に対応するためにテスト方法を適応させることの重要性を示しています。RDMAベースのHILシステムは、大きな進歩を示し、高いスループットと同期機能を提供します。Valeo社は、NIシステムを活用してADAS/AD検証の進化するニーズに対応し、変化を続ける自動車業界においてお客様にご満足いただけるよう取り組んでいきます。
登録商標Linux®は、全世界における商標保持者Linus Torvalds氏から排他的ライセンスを受けているLMI (Linux Mark Institute) からの許諾により使用しています。
NIパートナーは、日本アライアンスプログラムに参加しているシステムインテグレータを中心としたパートナー企業で、代理店の関係は有していません。また、NIとのいかなる取引関係にも属しません。