Altran社とNIによるセンサフュージョンを使用したADAS HILのデモンストレーション
概要
昨今の自動車メーカーは自律運転車の開発にまい進していますが、そこでニーズが高まっているのがHIL (Hardware-in-the loop) テストです。自律運転で中心的な役割を果たすと見込まれる先進運転支援システム (ADAS) の機能の検証に必要なためです。このホワイトペーパーでは、センサフュージョンの概念とともにADAS HILの概要を説明し、初期段階の調査で得られる主な考慮点を紹介して、アプリケーションの実装に使用する重要なシステムレベルの要素を取り上げます。
内容
センサフュージョンとは
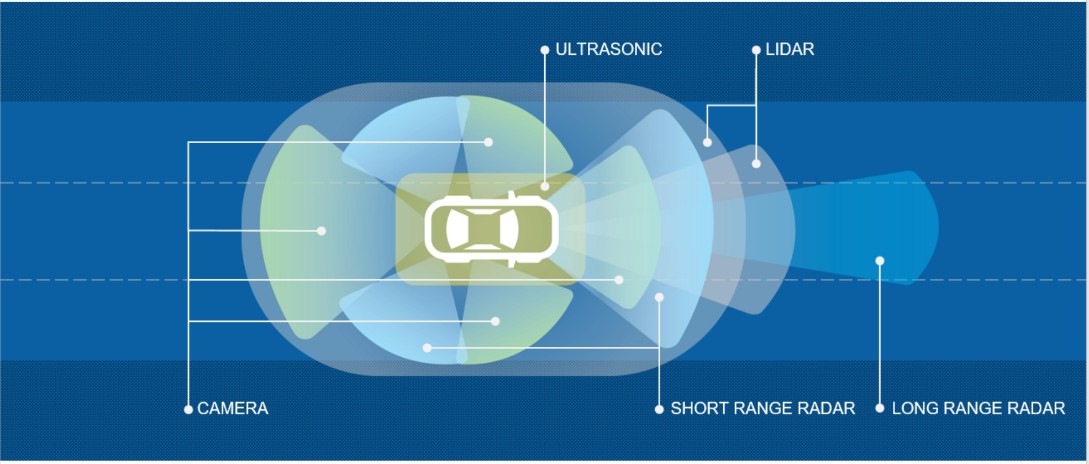
現在、多くの自動車が、レーダ、カメラ、LIDAR、超音波といったさまざまなセンサに基づいた複数のADASを搭載しています。これまでの経緯を見てみると、これらのセンサはそれぞれが個々の役割を果たすだけで、相互で情報共有を行うことはめったにありません。つまり、運転者が受け取る情報量は、使用するセンサの数に比例するということです。もしセンサデータを十分収集して、通信が整えば、スマートなアルゴリズムを使用して、自律システムの構築が可能になります。
センサフュージョンは、さまざまなセンサからの情報を組み合わせて、周辺環境をより明確に把握できるようにするものです。これは、より信頼性の高い安全機能とより効果的な自律運転システムの実現に必要とされる技術です。
図1. 車を取り巻く環境のイメージ
センサフュージョンが使用される状況
センサフュージョンはあらゆるタイプのセンサに対応することができます。典型的な例が、フロントカメラとフロントレーダから提供される情報の統合です。可視スペクトル内で機能するカメラは、雨、濃霧、強い日差し、光のない状態といった状況においては問題を生じますが、路面標識など、色の認識においては高い信頼性を発揮します。レーダは、たとえ低分解能であっても、距離の検知には有用で、環境条件に影響されることはありません。
フロントカメラおよびレーダのセンサフュージョンを利用した代表的なADAS機能には、以下のものがあります。
- アダプティブクルーズコントロール (ACC)―この車両用クルーズコントロールシステムは交通状況に合わせて車速を調節します。前走車との距離が安全しきい値を下回ると、速度を落とします。道路の見渡しが良く、前走車との距離が条件を満たしている場合、ACCは設定速度まで車両を加速させます。
- 自律緊急ブレーキ (AEB) ―これはブレーキシステムの制御技術です。衝突の危険性がある場合に速度を落としたり、危険な状況下で運転者へ警告を発したりします。
ADAS HIL Test Environment Suite (AHTES)
複合システムを検証する場合、センサに効果的に刺激信号を与えて、実世界の条件下での車両の挙動を検証する適切なテスト環境をセットアップする必要があります。
Altran Italia社は、NIの技術に基づいた画期的なレーダターゲットシミュレータと3D仮想道路シナリオをHILシステムに統合して、シナリオベースのテスタを開発しました。このテスタでは、カメラとレーダのデータを完全に同期させて、センサフュージョンアルゴリズムを検証します。
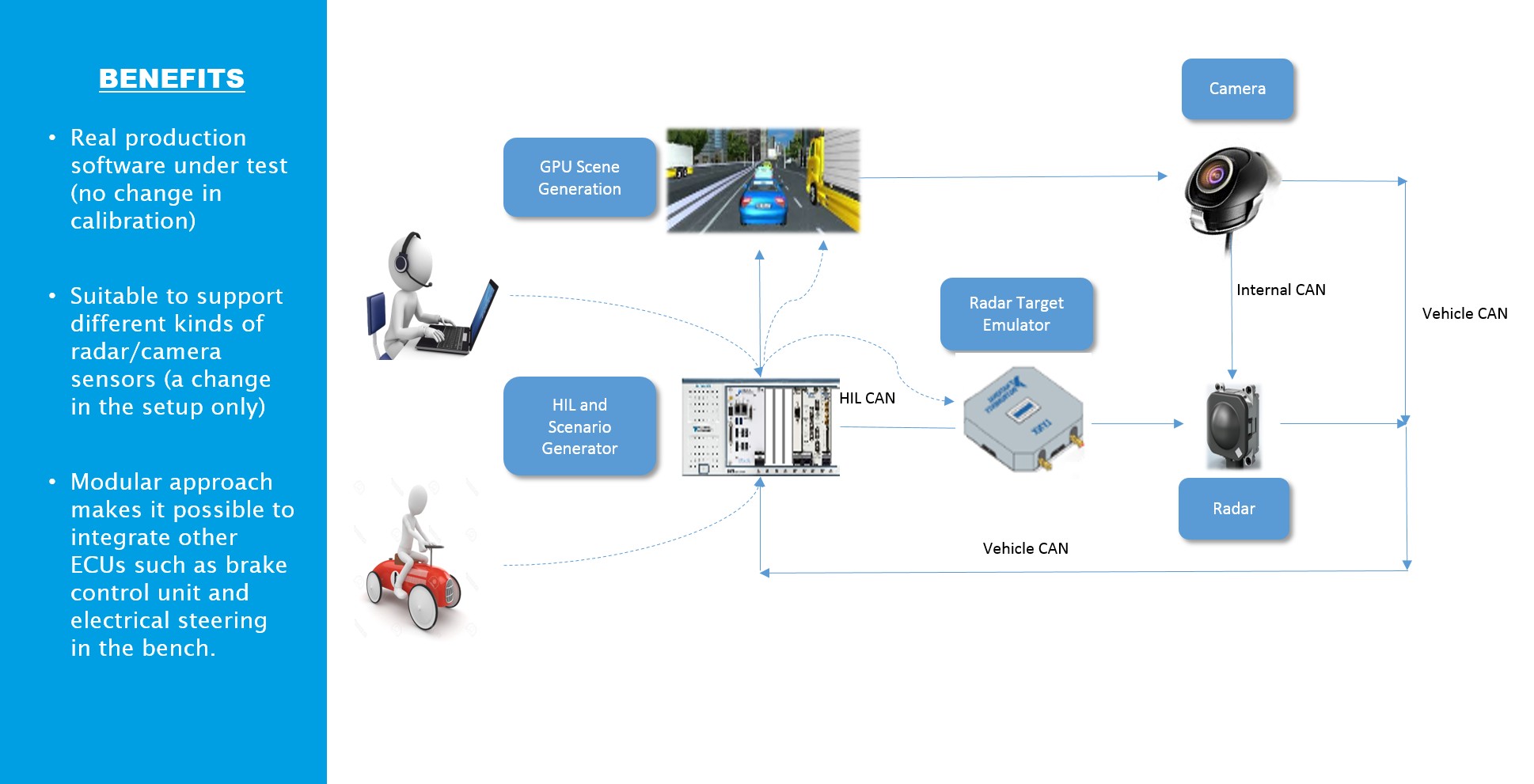
図2. ALTRAN-NI ADAS HILテストソリューション
3Dシナリオは、Unity Technologies社のクロスプラットフォームゲームエンジンであるUnity 3Dグラフィックエンジンに基づいています。また、構成可能であるため、レーンの数、照明条件、トラックタイプなどのパラメータをカスタマイズできます。 これ以外にもさまざまなグラフィックモデル環境が市販されており、IPG CarmakerやTASS PreScanなどを、同様に使用することができます。
このグラフィックエンジンは、車両のフロントガラスに設置されたカメラを視点とした光景を再現します。この光景は、地上からの高さとカメラの視界に基づいて変更することができます。また、別の車両など、障害物を規定速度でカメラから一定の位置に出現させることもできます。


図3. Unityグラフィックエンジンのシナリオ
車両を制御するため、このグラフィックエンジンはブレーキペダルおよびスロットルの位置をステアリング角度とともに受け取ります。PXIシステムでは、ハンドルとペダルからの信号のほかに、このデータも収集します (Logitech G29)。ダイナミック車両モデルは、グラフィックエンジン内に統合され、高度な構成が可能です。
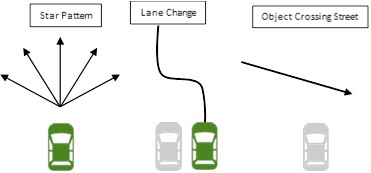
図4. 標準操作
選択した障害物シナリオ (上記の例を参考にしてください) によって、グラフィックエンジンは、車両速度とVRTSに必要な情報を出力して、RF信号を作成します。すべての入力/出力情報はPXIによって専用プロトコルを介して交換され、必要に応じて変更できます。
レーダターゲットのシナリオジェネレータからの情報 (距離、レーダ断面、到来角、速度) を取得するために、このセットアップでは、PXI-8512/2とのCAN通信が使用されました。PXI-8512/2は、PXIシステム用の2ポート高速CAN/CAN-FDインタフェースで、CANバスフレームを1 Mビット/秒のレートで送受信できます。この情報が障害物ジェネレータに送信されるのは、ターゲットに関する情報が連続した読み取りの間に変更された場合のみです。
また、PXIは、障害物シミュレータにデータを送信し、ペダルおよびハンドルの信号を収集するほか、プライベート車両ネットワーク上でレーダおよびカメラとの間でやり取りされるCANメッセージをエミュレートします。
CANメッセージは3D仮想シナリオおよびRFターゲットジェネレータと同期して、最新のカメラやレーダのデータの検証に適した環境を作り出します。
コンポーネントレベルの概要
次に示したのは、各システムコンポーネントおよび通信接続/バスの簡単な説明です。
- レーダエンジン制御ユニット (ECU) ―レーダセンサの主なタスクは、障害物を検知し、その速度と位置を、レーダを装備したホスト車両の動きを基準として計測することです。このレーダセンサは、マルチモーダルなモノスタティックレーダで、6個の固定レーダアンテナで76 GHzの周波数帯域を使用します。このセンサでは、約250メートル地点にある他の車両を検出できます。また、加熱レンズを装備しているため、雪や氷といった悪天候下であっても、センサをフル活用できます。対象物の相対速度はドップラー効果 (反射信号と送信信号間の周波数の変化) を使って計測され、対象物までの距離はタイムラグによって決定されます。
- カメラECU―周辺環境の画像を収集し、車線境界線やその他の対象物からの距離など、複数の情報を提供します。この情報はレーダECUへ送信され、センサフュージョンに使用されますが、情報が道路標識や車線維持などの場合はカメラECUが単体で機能します。この場合、車両CAN上でCANメッセージを送信します。
- ビデオシナリオ生成―CAN通信経由でPXI-8512/2からの入力を受信し、シミュレートした環境に関する情報を送信する車両システムを搭載したシミュレータです。距離、レーダ断面 (RCS)、到来角、速度といったレーダデータがシミュレーション中に生成され、ビデオシナリオに基づいてリアルタイムに計算されます。2つめの画面の制御パネルを使用して、PXI-8521/2との接続を操作したり、気象条件を変更したり、レーダ位置を調節したり、速度と距離を定義した新しい車両を生成したりすることができます。
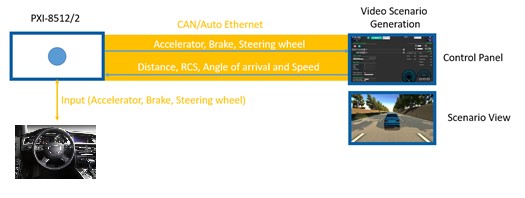
図5. 車両通信のエミュレーション
このシミュレータは、Unity Technologies社のクロスプラットフォームゲームエンジンであるUnity 3Dグラフィックエンジンを使用して開発されました。モジュール式アプローチを使用したビデオシナリオでは、あらゆる他社製プラットフォームやプラグイン、前出の画像で示したLogitech G29のようなデバイスなどを簡単に統合できます。
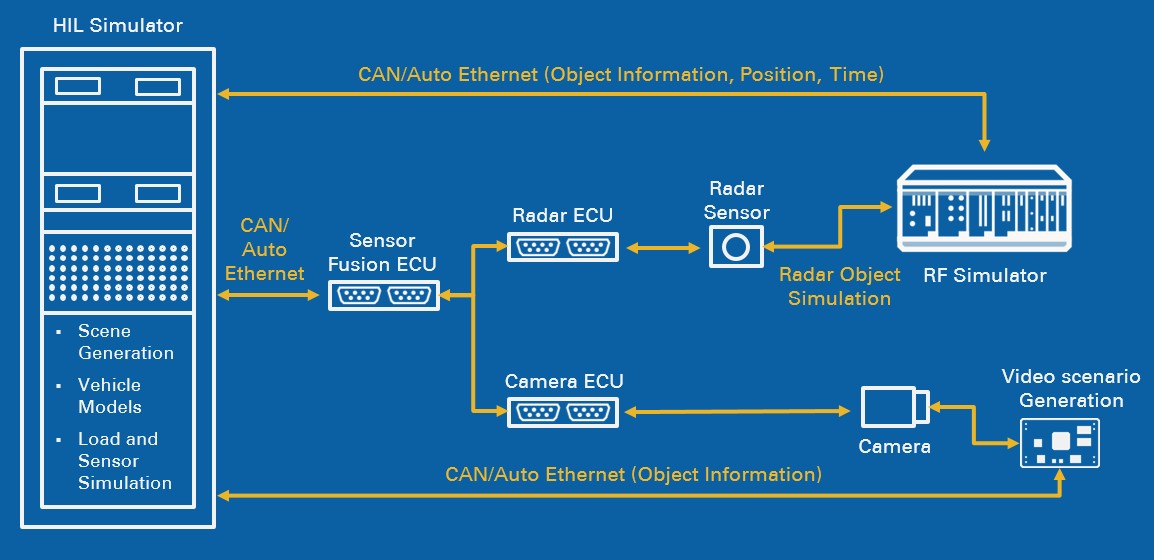
図6. ADAS HILテスト環境
レーダターゲットシミュレータは、テスト/計測用HILシステムで使用されます。NIシステムが持つ柔軟性、モジュール性、拡張性によって、レーダ設計/テストアプリケーション用の総合的HILテスタの一部として他のI/Oを簡単に統合できるうえ、ターゲットエミュレーションとレーダデバイス計測の両方に同じシステムを使用できるようになるため、デバイスおよびシステムテストのコストを削減することができます。
このシステムでは次のようなことができます。
- RF計測によるセンサの性能検証
- 信号解析: 等価等方放射電力 (EIRP)、ノイズ、ビーム幅、周波数
- チャープ解析: 線形性、オーバーシュート、記録、タグ付け
- レーダターゲットシミュレータによるセンサの機能検証
- 単一および複数のターゲット
- 固定および可変距離
- 複数の対象物シナリオ (距離、速度、サイズ、到来角)
- カスタマイズ可能なターゲットシナリオ
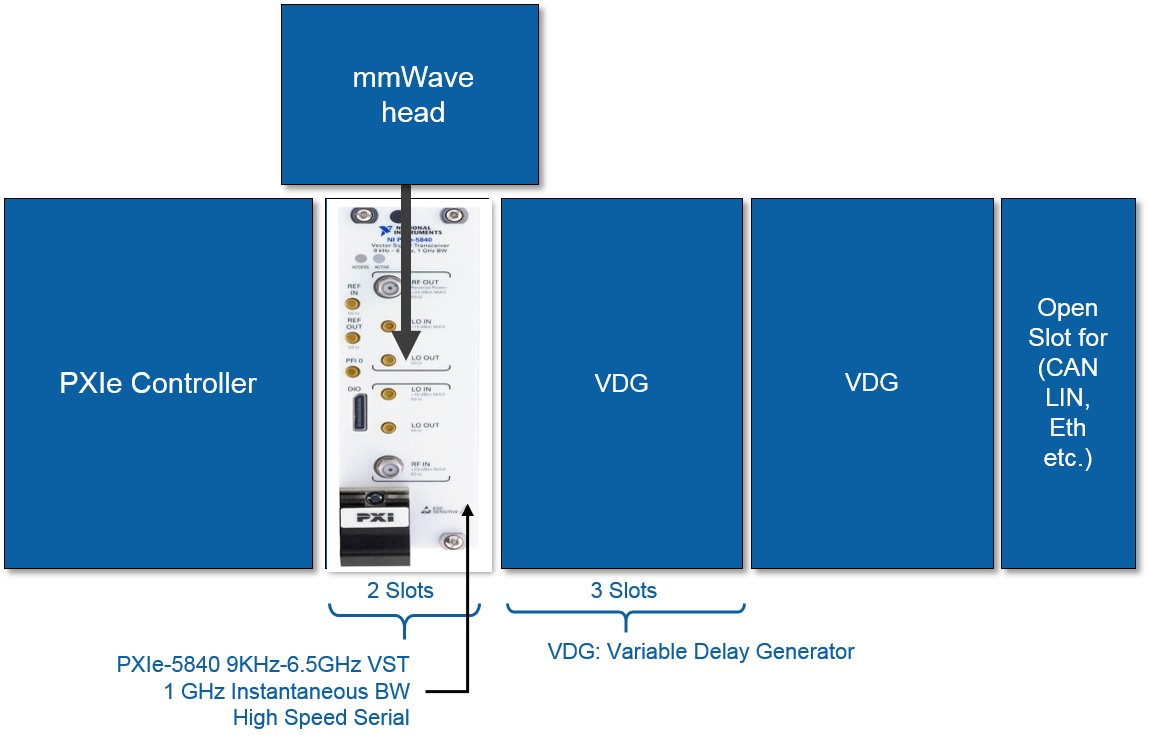
図7. 2ターゲット、1角度のシステムアーキテクチャ
図7では、1台のPXIe-5840ベクトル信号トランシーバと1台のミリ波ヘッドを使用したセットアップで、同じ到来角のターゲットを2つ生成できます。PXIプラットフォームの柔軟性により、このシステムを簡単に拡張して、複数の到来角で複数ターゲットを網羅できるようになります。図8は、4台のPXIe-5840デバイスと4台のミリ波ヘッドと使用した構成で、4つの到来角で最大8つの異なるターゲットをシミュレートできます。
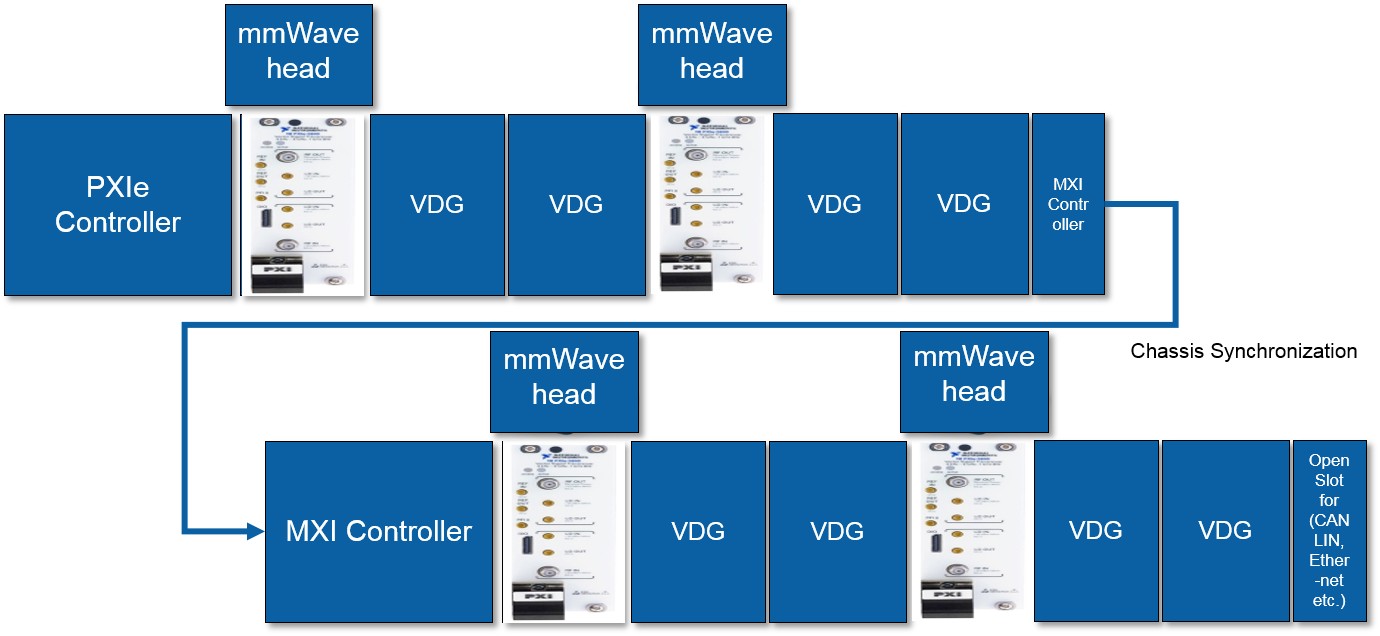
図8. 8ターゲット、4角度のシステムアーキテクチャ
レーダターゲットシミュレータシャーシは、標準の自動車バス通信 (CANまたはLIN) や、HILシステムに必要なその他のタイプの工業用通信モジュールと組み合わせることができます。このソリューションのモジュール性によって、自動車メーカーは複数の到来角を扱うことができるため、複雑な実世界のシナリオをテストすることができます。新車アセスメントプログラム (NCAP) のガイドラインによって提供される標準操作は、自動的にテストできるため、テスト時間および労力を削減できます。
まとめ
Altran社は、レーダやカメラなど、スタンドアロンまたは統合して機能するシステムによる実験室検証を実行できるということを証明しました。
どちらのコンポーネントも安全性の実現には不可欠であるため、自動車テストを実施する前に実験室でテストできることが重要なステップとなります。
この手法による検証には、次のようなメリットがあります。
- 自動車が発売される前の段階で検証を予測できれば、問題が発生して手遅れになる前に是正措置を取ることができます。
- 自動車が発売される前にテストを開始できるため、全体の開発時間が大幅に削減できます。
- 毎日24時間稼動できるシステムがあることで、開発コストが削減されます。
- 組み立て済み自動車を使用する場合と比較して、非回帰テストの実施にかかる時間が大幅に短縮でき、コストを最小限に抑えることができます。
ADAS HIL Test Environment Suiteは、NIのソフトウェアおよびハードウェアに基づいてAltran社によって作成され、その目的は確認と検証でした。ただし、その用途は確認と検証に限定されるものではありません。実際、ECUをキャリブレートして自動車テストのパラメータを検出するために使用することもできます。
ADASは、SLSC (switch load signal conditioning) ハードウェアなど、NIの他のHIL向けハードウェア製品と統合して、信号の標準化/経路設定、負荷切り替え、および信号調節を実行できます。VeriStandリアルタイムテストソフトウェアを使用すれば、各コンポーネントは、リアルタイムHILシステムとやり取りできるフレームワークに統合することができます。
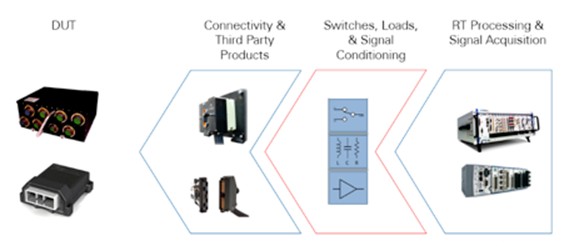
図9. SLSCをHILシステムに統合する方法
また、NIは、インフォテインメントテスト、バッテリ管理システムテスト、車車間 (V2X) 通信、車両のノイズ/振動解析など、コネクテッドカーや高度な自動車技術における業界最高水準のパートナー企業で構成されたエコシステムを活用して、プラットフォームを拡張しました。
図10. コネクテッドカーのVX2、LIDAR、GNSS
作成者
Mario Amoruso (National Instruments)
Stefano Caiola (National Instruments)
Giuseppe Doronzo氏 (Altran Italia社)
Marino Difino氏 (Altran Italia社)
レビュー担当者
Ram Mirwani (National Instruments)
Matteo Moriotti氏 (Altran Italia社)
Davide Palandella (National Instruments)
リソース
- Altran Group
- Using the SLSC Architecture to Add Additional Elements to the Signal Path of a Test System
Altran社について
エンジニアリングおよび研究開発 (ER&D) サービスのグローバルリーダーであるAltran社は、未来に向けた製品/サービスを開発することで、クライアントに革新への新たな手段を提供しています。コンセプトから工業化まで、プロジェクトのバリューチェーンのすべての工程においてクライアントとともに取り組みます。
同社グループは30年以上にわたり、特に航空宇宙、自動車、防衛、エネルギー、金融、ライフサイエンス、鉄道、電気通信といったセクタにおけるキープレイヤーに専門技術を提供してきました。
2016年、同社グループは2兆1,200億ユーロの収益を挙げました。3万人以上の従業員を擁し、20ヶ国以上でビジネスを展開しています。
Altran社は1996年にイタリアで創業され、現在の従業員数は約2,800名です。ローマに本社を置き、ほぼイタリア全域 (ジェノバ、トリノ、ミラノ、トリエステ、ヴェローナ、パドア、ボローニャ、モデナ、ピサ、フィレンツェ、ナポリ、ポミリアノダルコ、ブリンディジ) を網羅しています。2015年の売り上げは2億800万ユーロでした。
altran.com、altran.it