ディザリング、レイアウト、高品質コンポーネント: ノイズフロアを低減するツール
概要
アナログ計測に携わる科学者やエンジニアの間では「ノイズフロア」という用語が頻繁に使われます。ところが多くの場合、この用語は正しく理解されておらず、その結果、ノイズフロアが正しく扱われていないといった状況が見られます。計測で発生するノイズを低減するには、ノイズフロア、そのコンポーネント、また使用している計測システムでどのようにノイズを低減できるかを正しく理解する必要があります。
内容
ノイズフロアの概要
計測デバイスのノイズフロアは、入力を接地した状態で計測されたノイズのレベルです。
通常、ノイズフロアはノイズ密度関数 (単位は)、または合計ノイズを意味する1つの数字 (単位はVrms) で表されます。ノイズ密度関数をVrmsに変換するには、ノイズ密度関数を対象となる帯域幅に統合する必要があります。広帯域 (フラット) ノイズの場合、この統合は次のような簡単な乗算式になります。
通常、デバイスのRMSノイズはノイズ密度関数から取得できますが、1つの数字からはグラフ形状を取得できません。以下の図は、低周波数における一般的な計測デバイスのノイズ密度曲線を示しています。この曲線は、2つの部分から構成されています。コーナーと呼ばれるポイントから左側の急な曲線は、
ノイズと呼ばれます。
コーナーの右側では、ノイズレベルが平坦化され、これは広帯域ノイズと呼ばれます。
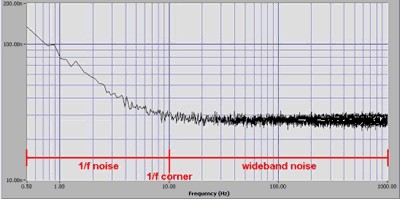
図1: ノイズスペクトル密度曲線
ノイズフロアのコンポーネント
通常、広帯域ノイズは周波数領域で平坦になります。これは、帯域幅の各Hzのエネルギーが同じレベルであることを意味します。この種類のノイズは、コンポーネントが信号パス上にある場合でも、または基準として使用されている場合でも、計測デバイスのあらゆるコンポーネントで発生します。こうしたコンポーネントには、オペアンプ、抵抗、電圧基準、アナログ-デジタル変換器 (ADC) などがあります。平均化などの後処理方法を使用すると、計測確度での広帯域ノイズの影響を最小に抑えることができます。これらの方法については、この記事でさらに詳しく説明します。
ノイズは、かなり複雑で、電圧密度が周波数の平方根に比例するため、
ノイズと呼ばれます。また
ノイズは「フリッカ雑音」と呼ばれることもあります。これはDMMの最下位ビットが反転 ("ちらつき/フリッカ") するためです。 ボードコンポーネント内の温度勾配やIC製造プロセスでの汚れがこのノイズの主な原因です。そのため、
ノイズの予測や制御は困難で、通常、IC製造元も
ノイズの影響を正確に特定することができません。データ収集 (DAQ) デバイスを使用するユーザにとっては、後処理の工程でこの不確実性を排除できないため、特に面倒な問題になります。たとえば、平均化を長く行うほどボードがドリフトする可能性が高くなるため、
勾配によっては、いくら平均化しても真の値に収束させることができない場合があります。実際、
スペクトルは左側に上昇して、抑制できるのは計測のアパーチャのみであることが実証されています。IC製造元でも、
ノイズレベルと製造する電圧基準の長期ドリフトとの間に強い相関関係があることを認めています。
ノイズフロアを最小に抑える
NIでは、高コモンモード除去比 (CMRR) を実現する高品質アンプを使用してデータ収集デバイスを設計することにより、データ収集デバイスの広帯域ノイズを最小限に抑えてきました。これによって、デバイスはアンプの両端子で検知されるノイズの大部分を除去できるため、確度低下の原因となるコモンモードノイズによる計測への影響を受けにくくなります。
NIのマルチファンクションデータ収集デバイスは、1つのグランド基準に接続される個別のグランドプレーンを搭載するように設計されています。 アナログ-デジタル変換器およびデジタル-アナログ変換器のチップでは、通常、チップの一方がアナログ信号用に、もう一方がデジタル信号用に設計されています。変換器チップをアナロググランドプレーンとデジタルグランドプレーン間のバリアをまたぐように設置することで、データ収集ボードのデジタル側で発生したノイズがチップのアナログ側やアナロググランドプレーンに存在するトレースに影響を与えることを防ぎます。
計測デバイスの温度勾配もノイズの原因になります。これに対処するために、NIでは、計測デバイスで温度ドリフトを最小に抑えるためのさまざまな機能を実装しています。整合された温度追跡回路とカスタムネットワーク抵抗器が使用されており、すべてのデータ収集ハードウェア上の温度ドリフトを6 ppm/℃に抑えることができます。また、適切に特性評価された
とドリフト特性を持つ高品質のコンポーネントも使用しています。さらに、1つの関数呼び出しで実行できるNIセルフキャリブレーション回路は、わずか0.6 ppm/℃のレートでドリフトする安定性の高い電圧ソースを参照しています。
ノイズフロアをさらに低減する
ICの不完全性や温度などの環境要因によるノイズの他に、ボードの分解能によってもノイズが発生します。これは量子化誤差として知られています。
NIドライバソフトウェアを使用すると、ソフトウェアによってディザリングを有効にすることができます。ソフトウェアを有効にすると、約0.5 LSBrmsのガウスホワイトノイズが入力信号に追加されます。このノイズは、信号がADCに入力される前に追加されます。これにより、ボードが検知できる最小電圧差 (コード幅と呼ばれ、式で算出) 内の任意の位置に存在できる信号は、そのコード境界の上下をランダムにバウンスします。サンプリングを行うと、ポイントは境界の上下両方に現れ、コード幅の上部または底部のいずれかにあるポイント数は実際の信号の場所によって重み付けされます。その後で平均化機能を使用すると、実質的にはボードの特定の分解能を超えるまでズームインが可能になり、高帯域幅ノイズの影響をあまり受けていない、より高確度な計測を行うことができます。たとえば、ディザリングを有効にすると、12ビットボードは14ビットの分解能で動作することができます。また、平均化を使用しない高速アプリケーションに対してはディザリングを無効にすることも可能です。
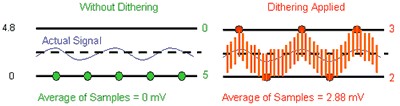
図2: ディザリングを使用して12ビットデバイスの量子化誤差を低減
これらの方法は、計測デバイス上の適切ではないコンポーネントによって発生するノイズだけではなく、計測システム上の他のコンポーネントに起因するノイズも低減します。また、システムレベルのノイズはセンサが原因となる場合があるため、高品質のセンサを選択してシステム全体で低いノイズフロアを確保する必要があります。環境、長いワイヤ、近隣の電界や磁界、その他のソースもシステムでノイズを発生させる可能性があります。外部ソースによるノイズを低減するには、システムを適切に接地して、シールドケーブルを使用する必要があります。これらのトピックについては、以下の関連リンクを参照してください。