From Saturday, Nov 23rd 7:00 PM CST - Sunday, Nov 24th 7:45 AM CST, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
From Saturday, Nov 23rd 7:00 PM CST - Sunday, Nov 24th 7:45 AM CST, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
センサに関連する信号調節回路で用いられる最も一般的な電気的等価は、電圧形式です。過酷な環境下で長い配線が必要な場所では、電流や周波数など他の電気現象へ変換することがあります。実際にはすべての場合において、変換された信号が測定前の時点で電圧信号に逆変換されるため、電圧信号ソースを理解することが重要となります。
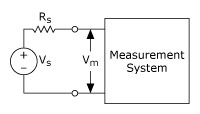
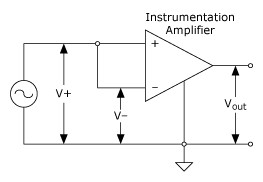
電圧信号は2点間の電位差として測定が行われます。これを図1に示します。
電圧ソースは、接地型と浮動型 (接地なし) の2種類に分類することができます。同様に、測定システムも接地型またはグランド基準型と浮動型 (接地なし) の2種類に分類されます。
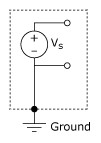
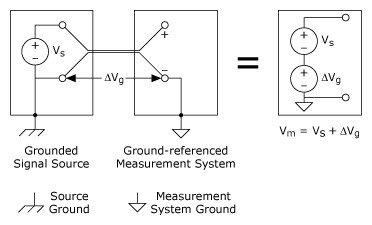
接地型ソースとは、建物のシステムグランドと接続されている電圧信号ソースのことです。接地型ソースの最も一般的な例として、出力信号が明示的に浮動でない共通のプラグイン計測器があります。図2は接地型信号ソースを示します。
通常、2つの接地型信号ソースでは電位差が生じます。同じ建物の電力システムに接続された2つの計測器のグランド電位差は、通常は10 mV~200 mVですが、配電回路が適切に接続されていないと電位差がそれ以上になる場合があります。
浮動型ソースとは、電圧信号がアースまたは建物のグランドなどのどのシステムグランドにも接続されていない信号ソースのことです。浮動型信号ソースの一般的な例としては、電池、電池式信号ソース、熱電対、変圧器、絶縁型アンプ、および出力信号が明示的に浮動である計測器などがあります。浮動型信号ソースは図3に示すとおりです。
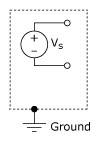
浮動型信号ソースでは、信号ソースの端子のどちらもコンセントのグランドに接続されていません。各端子はアースから離れています。
差動または非基準化測定システムの入力は、固定された基準 (アースや建物のグランドなど) に接続されていません。この測定システムの例としては、携帯型の電池式計測器および計装用アンプを搭載したデータ収集デバイスなどがあります。通常のNIのデバイスは、図4に示すように8チャンネルの差動測定システムとして使用できます。アナログマルチプレクサを使用することで、計装用アンプが1つしかなくても測定チャンネル数を増やすことができます。図4では、AI GND (アナログ入力グランド) ピンは測定システムグランドです。
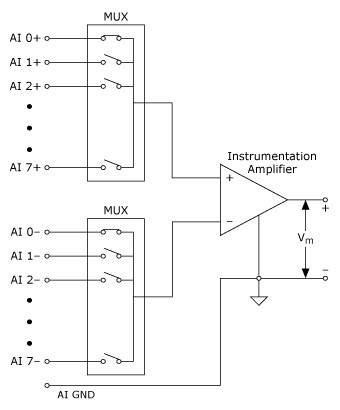
理想的な差動測定システムは、2つの端子間 (正 (+) と負 (-) の入力) の「電位差」のみに反応します。アンプの両方の入力端子に存在し、計装用アンプのグランドに対して測定される電圧はコモンモード電圧と呼ばれます。理想的な差動測定システムではコモンモード電圧を完全に除去でき、測定結果に現れません。多くの場合、配線システムの回路に余分なノイズがコモンモード電圧として取り込まれますが、差動測定システムを使用することで、ノイズの除去を行うことができます。ただし、実用的なデバイスにはコモンモード電圧レンジやコモンモード除去比 (CMRR) などのパラメータで示されるいくつかの制限があり、コモンモード電圧を完全には除去できないことがあります。
コモンモード電圧Vcmは以下のように定義されます。
このとき、V+は測定システムグランドに対する非反転端子の電圧で、V–は測定システムグランドに対する反転端子の電圧です。CMRRはdB単位で以下のように定義されます。
CMRRを表す簡単な回路は図5に示すとおりです。この回路では、dB単位のCMRRは20 log Vcm/Vout (ここでV+ = V– = Vcm) で測定されます。
コモンモード電圧の範囲によって、測定システムグランドに対する各入力の許容電圧の範囲が制限されます。この制限を超えた場合、測定値の誤差が生じるだけでなくデバイスのコンポーネントが損傷する原因ともなります。上記で説明したように、CMRRは差動測定システムで測定し、コモンモード電圧信号を除去する能力を示しています。CMRRは周波数の関数で、通常は周波数で返されます。平衡回路を使用すると、CMRRを最適化できます。詳細はこのドキュメントの後半で説明します。ほとんどのデータ収集デバイスは、最大60 HzのCMRR (電線周波数) の仕様を定めています。
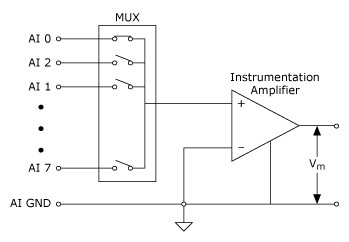
グランドまたはグランド基準測定システムは、グランドに対して測定を行う点で接地型ソースに似ています。図6は、8チャンネルグランド測定システムを示します。これは、シングルエンド測定システムとも呼ばれます。
通常、データ収集デバイスでは、非基準化シングルエンド (NRSE) 測定として知られるシングルエンド測定のさまざまなテクニックが見られます。NRSE測定システムは図7に示すとおりです。
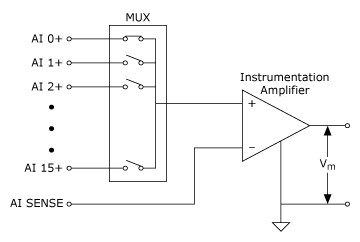
NRSE測定システムでは、すべての測定は単一ノードのアナログ入力センス (AI SENSE) に対して行われますが、このノードでの電位は測定システムグランド (AI GND) に対して異なる場合があります。図7は、単一チャンネルNRSE測定システムが単一チャンネル差動測定システムと同じであることを示します。
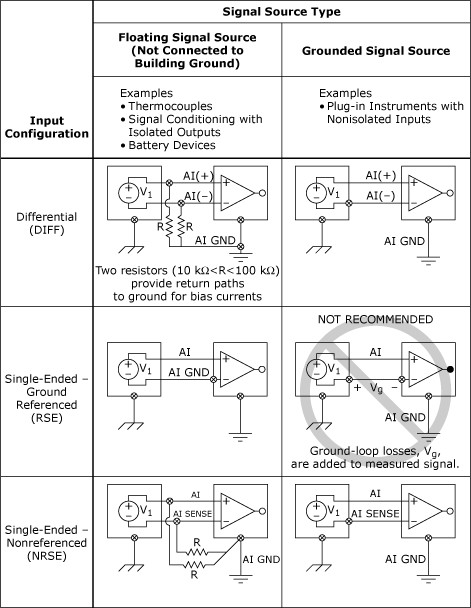
異なる信号ソースタイプと測定システムを認識できると、各信号ソースタイプに適切な測定システムを検討できるようになります。
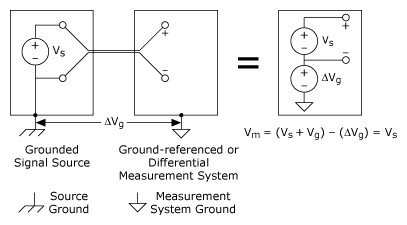
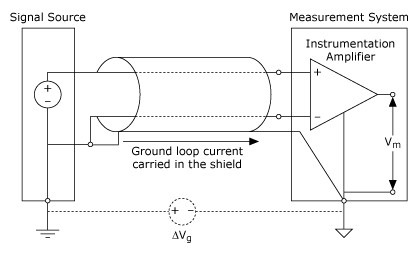
接地型信号ソースは、差動または非基準化測定システムで測定するのが最も適しています。図8は、グランド基準測定システムで接地型信号ソースを測定する場合の問題点を示しています。この場合、測定された電圧 (Vm) は、信号電圧 (Vs) と、信号ソースグランドと測定システムグランド間に存在する電位差であるDVgの和です。この電位差は、通常DCレベルではありません。ノイズの多い測定システムでは、読み取り値に電源周波数 (60 Hz) 成分が含まれる場合がよくあります。グラウンドループによって生じたノイズには、ACおよびDC成分の両方が含まれ、測定時にオフセット誤差やノイズが生じる可能性があります。2つのグランド間の電位差は、配線上に電流が流れる原因となります。この電流は、グラウンドループ電流と呼ばれます。
グランド基準システムは、信号電圧レベルが高く、信号ソースと測定デバイス間の配線のインピーダンスが低ければ、使用しても問題ありません。この場合、信号電圧測定値はグラウンドループによって悪化しますが、許容範囲内であると考えられます。接地型信号ソースをグランド基準測定システムに接続する前に、信号ソースの極性を確認する必要があります。これは、信号ソースがグランドに短絡され、信号ソースに損傷を与える可能性があるためです。配線に関する注意事項はこのドキュメントの後半で説明します。
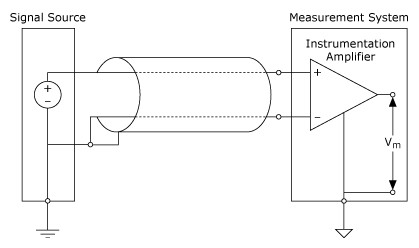
差動測定 (DIFF) システムや非基準化シングルエンド (NRSE) 測定システムの入力構成は、一般的なデータ収集デバイスに対して非基準測定を行います。いずれの場合も、信号ソースと測定デバイスの基準間の電位差は、測定システムに対してコモンモード電圧として現れますが、測定される信号ではこのコモンモード電圧は差し引かれます。これを示したのが図9です。
浮動型信号ソースは、差動およびシングルエンド測定システムのどちらでも測定することができます。ただし、差動測定システムを使用する場合は、測定システムグランドに対する信号のコモンモード電圧レベルが、測定デバイスのコモンモード入力レンジ内であることを確認します。
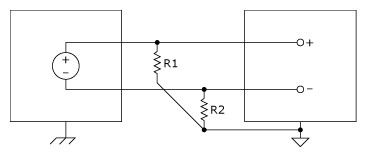
浮動型信号ソースの電圧レベルは、さまざまな現象 (計装用アンプ入力バイアス電流など) によってデータ収集デバイスの入力ステージの有効なレンジ範囲外になる可能性があります。この電圧レベルをある基準に安定させるには、図10に示すように抵抗を用います。バイアス抵抗と呼ばれるこれらの抵抗を用いることにより、計装用アンプの入力から計装用アンプのグランドへのDCパスが用意されます。これらの抵抗は、ソースが測定基準 (前述の測定システムに説明があるAI GND) に対して浮動であり、信号ソースをロードしなくてもデバイスの入力範囲の電圧値を維持できる値でなくてはなりません。熱電対や信号調節モジュールの出力などの低インピーダンスを持つソースでは、通常10 kΩ~100 kΩの値が適しています。これらのバイアス抵抗は、各リードと測定システムのグランドの間に接続されます。
警告:このような抵抗を使用しないと読み取り値が一定しなかったり、プラスのフルスケールまたはマイナスのフルスケールに飽和したりすることがあります。
入力信号がDCカプリングされている場合、(–) 入力から測定システムのグランドに接続されている抵抗のみが要求されます。これは、バイアス電流パス要件を満たしますが、信号ソースのソースインピーダンスが比較的高い場合に不平衡型システムの原因となります。平衡型システムは耐ノイズ性の点で効果的です。このため、信号ソースのソースインピーダンスが高い場合は、値の等しい2つの抵抗 (HIGH (+) 信号入力への抵抗とLOW (–) 信号入力からグランドへの抵抗) を使用する必要があります。熱電対などのDCカプリングされた低インピーダンスソースに対しては、1つのバイアス抵抗で問題ありません。平衡型回路については、このドキュメントの後半で説明します。
入力信号がACカプリングされている場合は、計装用アンプのバイアス電流パスの要件を満たすには2つのバイアス抵抗が必要です。
図10に示すとおり、抵抗 (10 kΩ < R < 100 kΩ) によって、計装用アンプの入力バイアス電流の、グランドへのリターンパスが用意されます。DCカプリングの信号ソースにはR2のみが必要です。ACカプリングの信号ソースの場合は、R1 = R2にします。
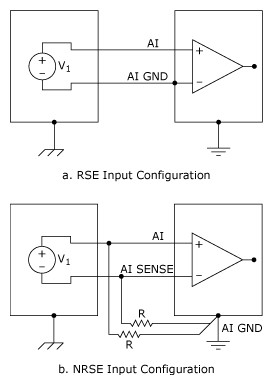
シングルエンド入力モードを使用する場合は、RSE測定システム (図11a) で浮動型信号ソースを測定できます。この場合、グラウンドループは発生しません。また、NRSE測定システム (図11b) も使用できます。こちらの方がノイズ除去という観点から見ると適しています。NRSE入力構成で浮動型信号ソースを測定する場合には、AI SENSE入力と測定システムグランド (AI GND) の間にバイアス抵抗が必要です。
次の表1は、これまでのディスカッションを図式化してまとめたものです。
表1. アナログ入力接続
メモ: 接地型信号ソースを使用する場合は、基準化シングルエンド (RSE) は推奨されていません。
警告:バイアス抵抗は、DIFF構成とNRSE構成の浮動型信号ソースの測定時に使用しなければなりません。このような抵抗を使用しないと読み取り値が一定しなかったり、プラスのフルスケールまたはマイナスのフルスケールに飽和したりすることがあります。
一般的には、グラウンドループに起因する誤差だけでなく、一定の条件の環境下でノイズも除去できる差動測定システムの使用が推奨されます。一方で、シングルエンド構成は差動構成に比べて2倍の測定チャンネル数を利用できますが、起因している誤差振幅が要求されたデータ確度よりも小さい場合にのみに使用が限定されます。シングルエンド入力接続は、すべての入力信号が以下の条件を満たす場合に使用します。
上記の条件が満たされない場合は、差動接続を使用してください。
上記のガイドライン沿って構成し、グラウンドループやアナログ入力ステージの飽和を回避している場合でも、環境下で発生したノイズや不要な信号が測定信号に含まれてしまいます。特に、これは多くのデータ収集デバイスのオンボードアンプで低レベルのアナログ信号を増幅している場合によく見られる現象です。現象が悪化すると、PCデータ収集ボードでは、一般的にI/Oコネクタ上で複数のデジタルI/O信号が発生します。その結果、相互接続ケーブルの低レベルアナログ信号に対して近い場所で発生しているため、データ収集ボードで発生するデジタル信号は、増幅した信号でノイズの原因となります。この増幅信号やその他の外部ソースでノイズカプリングを最小限にするには、適切な配線とシールド構造が必要です。
適切な配線とシールドの検証を行う前に、干渉やノイズカプリングの問題の性質について理解することが必要です。ノイズカプリング問題については、単純明瞭な解決策はありません。さらに、解決策が不適切な場合には問題をさらに悪化させる可能性もあります。
図12は、干渉やノイズカプリングの問題を示します。
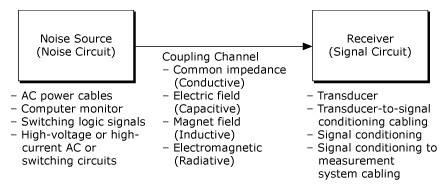
図12に示すとおり、ノイズを「拾う」主な原因となるカプリングのメカニズムは、4つ (伝導、静電、誘導、放射) あります。伝導カプリングは、共通インピーダンスで異なる回路から電流を共有すると発生します。静電カプリングは、信号パスの付近で時間変動電界から発生します。誘導カプリングノイズまたは電磁カプリングノイズは、信号回路に囲まれた領域で時間変動電界から発生します。電磁場源が信号回路から離れている場合、電界と磁界のカプリングは、電磁カプリングや放射カプリングの組み合わせとみなされます。
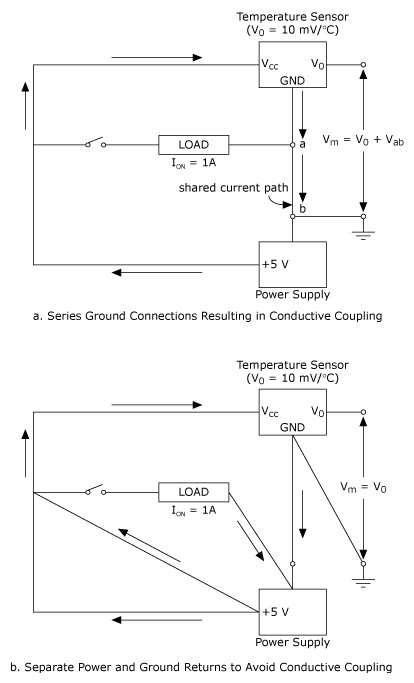
伝導カプリングノイズは、配線する伝導体に有限インピーダンスがあるために発生します。これらの配線インピーダンスによる影響は、配線構造を設計する際に考慮する必要があります。グラウンドループが存在する場合は切断するか、または低レベルと高レベルの両方の高電力信号に対して異なるグランドを使用すると、伝導カプリングを除去したり最小限に抑えたりすることが可能です。図13aに示すようなグランド接続により、伝導カプリングが発生します。
AからBの一般的な戻り線の抵抗が0.1 Ωの場合、0.1 Ω×1 A = 100 mVとなり、温度センサの測定電圧は、スイッチの開閉状態により変化します。温度測定誤差に変換すると、10℃となります。一方、図13bの回路では異なるグランドリターンがあります。したがって、測定温度センサ出力は、重負荷回路の電流のON/OFFでも変化しません。
ノイズおよび信号回路における磁界と電界の相互作用の検証に必要な解析ツールとして、数学的に自明でないマクスウェル方程式があります。ただし、これらのカプリングチャンネルの直観的で質的な確認については、集中等価回路が使用できます。図14および15は、電界カプリングと磁界カプリングの集中等価回路を示します。
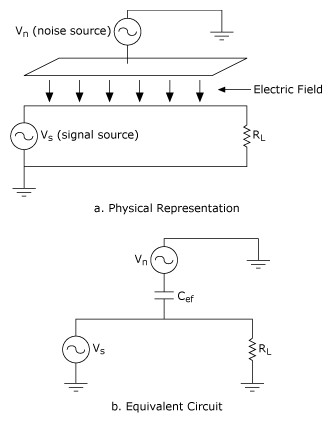
ノイズ等価回路への集中等価回路モデルの導入は、基底となる2つの電気回路解析の (すべての電界はコンデンサ内部の範囲内/すべての磁界は誘導体内部の範囲内という) 仮説の問題点を処理します。
図14は、有効なカプリングチャンネルの集中等価回路です。電界カプリングは2つの回路間のキャパシタンスとしてモデル化されます。等価キャパシタンスCefは、重なり合う領域に比例し、2つの回路間の距離に反比例します。したがって、ノイズ回路から信号回路までの距離を離したり、重なりを最小限にしたりするとCefも最小限になります。静電カプリングのその他の特性は、モデルによって異なります。たとえば、静電カプリングのレベルは、ノイズソースの周波数と振幅、および影響を受ける回路のインピーダンスに比例します。したがって、静電カプリングは、ノイズソース電圧や周波数、または信号回路インピーダンスが少なくなると減少します。また、等価キャパシタンスCefは、容量性シールドを使用する場合も減少します。容量性シールドは、誘導電流をバイパスしたり、別のパスを提供することにより動作するため、信号回路には流れません。適切な容量性シールドは、シールド位置とシールド接続の両方に注意する必要があります。シールドは、静電カプリングが発生する伝導体とソース終端側のみにグランド接続をしなければなりません。シールドが両端で接地される場合、かなりのグランド電流がシールドに流れてしまいます。たとえば、グランド間の1 Vの電位差は、0.5 Ωの抵抗がある場合にシールドに流れる2 Aのグランド電流を強制できます。約1 Vの電位差はグランド間で発生します。このグランド高電流の影響に関する詳細は、誘導カプリングノイズの説明に記載します。一般的に、金属または信号パスの付近の伝導体は、静電カプリングノイズが大きくなる可能性があるため、電気的に浮動のままにしないでください。
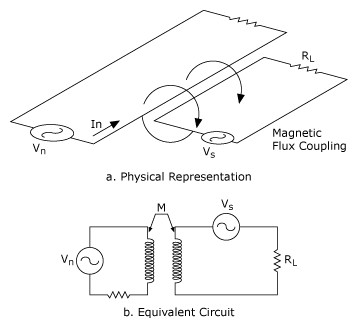
前述したように、誘導カプリングは、結果として信号回路ループにより囲まれた領域に時間変動磁界が生じます。これらの磁界はノイズ回路付近の電流により生成されます。信号回路の誘導電圧Vnは以下の式で求められます。
ここで、fは正弦的に変化する磁束密度の周波数、Bは磁束密度のrms値、Aは信号回路ループの領域、θは磁束密度Bと領域Aの間の角度です。
図15 (b) に示すとおり、誘導カプリングの集中等価回路モデルは相互インダクタンスMです。相互インダクタンスMについて、Vnは以下の式で求められます。
ここで、Inはノイズ回路の正弦波電流のrms値、fは周波数です。
Mは影響を受ける回路ループの領域に比例し、ノイズソースの回路と信号回路間の距離に反比例するため、距離を離したり、信号ループ領域が最小になると、2つの回路間の誘導カプリングも最小限になります。または、ノイズ回路の電流Inまたは周波数を下げても、誘導カプリングが減少します。ノイズ回路の磁束密度Bも、ノイズソースの配線をツイストすると減少します。最終的に、磁気シールドがノイズソースまたは信号回路に適用され、このカプリングを最小限にできます。
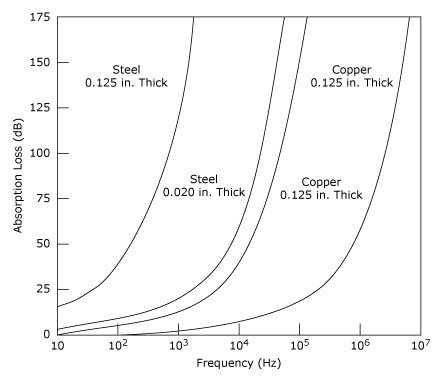
低周波数磁界に対するシールドは、電界に対するシールドほど容易ではありません。磁気シールドの効果は、材料のタイプ (透磁率、厚み、周波数の状態) によって異なります。スチールは相対的に高い透磁率のため、低周波数 (概算で100 kHz未満) の磁界シールドとしてアルミニウムや銅よりも効果的です。ただし、より高い周波数の場合にはアルミニウムと銅も同様に使用できます。2種類の厚さの銅と鋼の吸収損失は図18に示すとおりです。これらの金属の磁気シールド特性は、通常の環境下で主要低周波数の磁気カプリングノイズソースの電源 (50~60 Hz) など、低周波数では非常に効率が悪くなります。ミューメタル (鉄とニッケルの合金) を使用した磁気シールドは、低周波数の磁気シールド用に利用できますが、ミューメタルは非常に壊れやすく、劣化して透磁率が低下することがあります。つまり、衝撃により磁気シールドとしての効率が劣化します。
ノイズ回路パラメータ上で制御が不可能であること、また磁気シールドを完成させることが比較的困難であることから、信号回路ループ領域を小さくすることは、誘導カプリングを最小限にする際に効果的です。ツイストペアワイヤは、信号回路のループ領域を減少させ、誘導誤差を相殺するため有益です。
式 (2) は、図16のように回路のシールドでグラウンドループによって電流が流れる影響を算出します。ここで、In = 2 A、f = 60 Hz、M = 1 µH/ftで、10-ftケーブルは以下のとおりになります。
このノイズレベルは、10 V範囲で12ビットデータ収集システムの3.1 LSBに変換されます。したがって、データ収集システムの効果は概算で10ビット収集システムの状態に下がります。
Eシリーズデバイスにおいて差動モードでシールドケーブルを使用する場合、信号回路ループ領域は、信号リード線の各ペアがツイストペアとして構成されるため、誤差が最小になります。これは、異なるサイズのループ領域がさまざまなチャンネルで構成されるため、同じデバイスとケーブルを使用するシングルエンドモードの状態とは異なります。
図19に示すとおり、磁気誘導電圧が一連の電流信号ソースに発生するため、この電流信号ソースは電圧信号ソースと比較してこのタイプのノイズに影響を受けません。V21およびV22は誘導カプリングノイズソースで、Vcは静電カプリングノイズソースを表しています。
誘導カプリングと静電カプリングのレベルは、ノイズ振幅、およびノイズソースと信号回路の近接性によって異なります。したがって、回路の干渉から離してノイズソースの振幅を減少させることは有益です。伝導カプリングは直接接点を生じさせるので、ノイズ回路の物理的な距離を長くすることは役に立ちません。
ラジオやTVのブロードキャストステーションおよび通信チャンネルなど、放射ソースが原因の放射カプリングは、通常、低周波数 (100 kHz未満) の帯域幅測定システムの干渉ソースとしてみなされません。ただし、高周波数ノイズは、「オーディオ整流」と呼ばれる処理を介し、低周波数回路に整流されて発生することがあります。この処理で、整流器としてICに非線形点が生じます。長い配線の終端にある受信機で、シンプルで受動的なR-Cローパスフィルタを使用することで、オーディオ整流を減少させることができます。
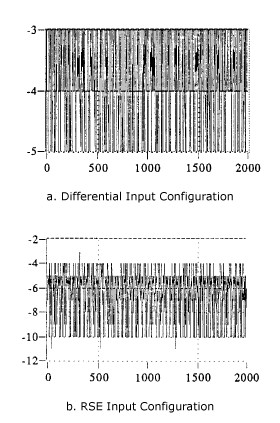
ユビキタスコンピュータ端末は、状況により変化する回路の付近では電界と磁界の干渉ソースとなります。図20は、オンボードのプログラマブルゲインアンプで500のゲインを使用するデータ収集デイバスで取得したデータのグラフを示します。入力信号は終端ブロックで短絡して、0.5 mの非シールド内部接続ケーブルが端子台とデバイスI/Oコネクタの間で使用されていました。差動信号接続では、チャンネルHIGH入力とチャンネルLOW入力を配線し、アナログシステムのグランドがされていて、シングルエンド接続では、このチャンネル入力はアナログシステムのグランドに対して接続されていました。
振動する環境で内部ケーブルが振動してしまう場合は、常に、信号回路ループの磁束の変更による摩擦電気の影響と誘導電圧に注意することが必要です。ケーブル導体が固定されていない場合、そのケーブル内の誘電体に生成された電荷により摩擦電気が発生します。
磁束が変わると、一方または両方の伝導体のモーション (誘導カプリングとは別の現象) により発生する信号回路ループ領域で変更が生じます。これを避けるには、ケーブルが垂れさがらないように調整し、そのケーブルを固定することです。
不注意により異種類の金属で構成された熱電対など、非常に低レベルの回路を使用した測定回路では、別のソースの測定誤差に注意を払う必要があります。熱電対の影響による誤差は干渉タイプの誤差とはみなされませんが、低レベル信号測定のチャンネル間で不明なオフセットが発生する原因となる可能性があるため、確認が必要です。
差動測定システムの説明で、CMRRは平衡型回路で最適化されることを説明しました。平衡型回路とは以下の3つの条件を満たしているものです。
誘導ノイズ電圧は、グランドとノイズソースに対して等しいインピーダンスにより、両方の伝導体で同じになるため、平衡型回路で容量性の影響が最小限になります。
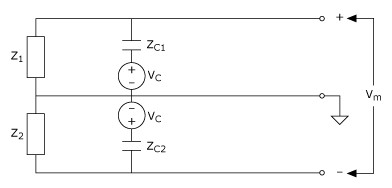
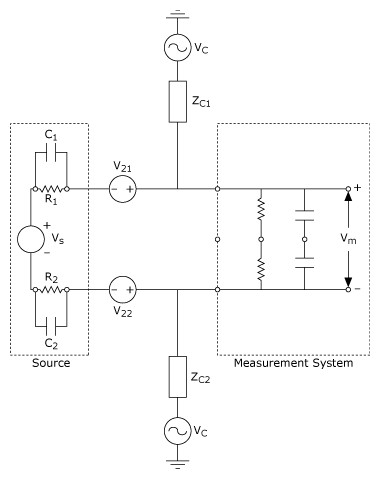
平衡型システムを示す図21の回路モデルの場合、以下の条件が適用されます。
簡易回路の解析では、平衡型ケースがV+ = V–のため、静電カプリング電圧Vcがコモンモード信号として表示されることを示します。非平衡型ケースでは、Z1<> Z2またはZc1<>Zc2のいずれかになり、静電カプリング電圧Vcは差動電圧として表示され、V+<>V–のため計装用アンプで除去することはできません。システムの不均衡、またはグランドや静電カプリングノイズソースに対するインピーダンスの不一致の度合が高くなればなるほど、静電カプリングノイズの差動コンポーネントも高くなります。
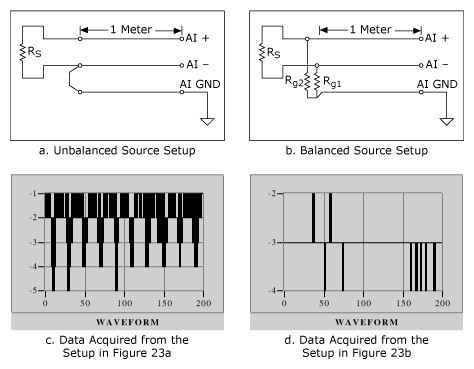
差動接続では配線のデータ収集デバイス側で平衡型受信機がありますが、ソースや配線のバランスがとれていないと回路のバランスはとれません。これを示したのが図22です。データ収集デバイスは、差動入力モードとしてゲイン500で構成されています。ソースインピーダンスRsは両方の構成で同じ (1 kΩ) です。図22bの回路で使用されるバイアス抵抗は両方とも100 kΩです。コモンモード除去は、図22aの回路よりも図22bの回路のほうが良い状態です。図22cと図22dは、22aと22bのそれぞれの構成でデータ収集した時間領域プロットです。均衡型ソース構成にはノイズ周波数成分が存在しないことがわかります。この構成でのノイズソースはコンピュータモニタです。また、均衡型の構成では以下の式で信号ソースにも負荷があります。
この負荷効果は無視できません。不均衡型の構成では信号ソースに負荷がありません。
図22aのような構成では、システムの不均衡 (HIGH状態の信号とLOW状態の伝導体のグランドに対するインピーダンスでの不一致) は、ソースインピーダンスRsに比例します。Rs = 0 Ωに限定された場合では、図22aの設定も均衡が取れているため、ノイズの影響が減少します。
ツイストペアまたはシールドツイストペアは均衡の取れたケーブルの例です。一方、同軸ケーブルは、2つの伝導体のグランドに対するキャパシタンスが異なるため、均衡がとれていません。
ソースインピーダンスは、ソースからデータ収集システムへの配線で容量性ノイズ耐性を決定する場合に重要になるため、最も一般的なトランスデューサの一部について、インピーダンス特性の一覧を表2に示します。
トランスデューサ
| インピーダンス特性
|
熱電対
| 低 (<20 Ω)
|
サーミスタ
| 高 (>1 kΩ)
|
抵抗温度計
| 低 (<1 kΩ)
|
ソリッドステート圧力トランスデューサ
| 高 (>1 kΩ)
|
歪みゲージ
| 低 (<1 kΩ)
|
ガラスpH電極
| 高 (1 GΩ)
|
ポテンショメータ (直線変位)
| 高 (500 Ω ~ 100 kΩ)
|
高インピーダンスで低レベルセンサの出力は、センサ付近の信号調節機器側で処理してください。
測定設定でノイズ問題を解決するには、まず、干渉問題の原因を見つける必要があります。 ノイズ問題はトランスデューサからデータ収集デバイスまでのすべてが対象になり得ます。一般的に問題の原因追究には、試行と除外が繰り返し行われています。
まず、配線しない状態で低インピーダンスソースのデータ収集デバイス自体の測定ノイズを表示して確認する必要があります。これは、データ収集デバイスのI/Oコネクタで、できるだけ短くしたワイヤをアナログ入力のグランドに対してHIGHとLOWの信号を短絡すると簡単に実行できます。この試行で得られたノイズレベルを検証することにより、目的のデータ収集デバイスでの最良のケースがわかります。測定したノイズレベルが、すべてセットアップされた状態 (データ収集デバイス、配線、信号ソース) で検証したレベルより減少していない場合、測定システム自体がノイズの原因となります。データ収集デバイスで検証したノイズが仕様を満たしていない場合、コンピュータシステムの他のデバイスの1つが原因となります。
システムから他のボードを取り外し、検証したノイズレベルが減少するかどうか試してください。代替方法は、データ収集ボードが取り付けられているスロットのボード位置を変更することです。
コンピュータモニタの位置も対象になります。低レベル信号測定では、信号配線とコンピュータからモニタをできるだけ遠い場所に置くことが最良の方法です。低レベル信号の収集や生成を行う場合、コンピュータ上部にモニタを設置することは好ましくありません。
集録デバイスが原因でなければ、次に信号調節の配線と集録デバイスまでの配線環境を確認します。信号調節ユニットまたは信号ソースは、検証済みのデジタル化されたデータのノイズレベルである低インピーダンスソースに置き換える必要があります。低インピーダンスソースは、アナログ入力のグランドに対するHIGHとLOWの信号で直接短絡になることがあります。ただし、この場合、短絡はケーブルの終端に位置します。検証したノイズレベルが、概算で短絡に代わる実際の信号ソースのレベルと同じ場合は、配線や配線環境が原因となります。考えられる解決策は、ケーブルの再配線およびノイズソースとの距離をとることです。ノイズソースが不明な場合、ノイズのスペクトル解析により干渉周波数を確認します。この干渉周波数はノイズソースを見つける際に有益です。ただし、検証したノイズレベルが実際の信号ソースより低い場合、ソースの出力抵抗とほぼ等しい抵抗器を、ケーブルの終端に短絡するよう取り付けます。これにより、高ソースインピーダンスによるケーブルの静電カプリングが問題になっているかどうかがわかります。この最後の構成で検証したノイズレベルが、実際の信号でのレベルよりも低い場合、配線と環境は問題の対象から外されます。この場合、原因は信号ソースそのもの、またはソースタイプに対するデータ収集デバイスの不適切な構成のいずれかです。
信号処理技術は、適切なシステムの相互接続の代用にはなりませんが、ノイズ除去に利用できます。すべてのノイズ除去信号処理技術は、SN比を向上させる代わりに信号帯域幅を制限します。大きく見ると、この処理は集録前測定または集録後測定に分けられます。集録前技術の例として、信号で帯域外ノイズを除去するさまざまなタイプのフィルタ処理 (ローパス、ハイパス、バンドパス) が挙げられます。測定帯域幅がダイナミック信号やトランスデューサの周波数レンジを超える必要はありません。集録後技術は、デジタルフィルタ処理で説明できます。最もシンプルな集録後のフィルタ処理テクニックは平均化です。これにより集録データのコムフィルタ処理が行われます。この処理は特定の干渉周波数 (50~60 Hzなど) の除去に特に役立ちます。50 Hz~60 Hz電源など、低周波数ソースの誘導カプリングは、シールド処理が困難です。平均化による最適な干渉の除去については、平均化Tacqに使用した集録データの時間間隔がTrej = 1/ Frejの整数倍でなければなりません。ここで、Frejは最適な状態で除去された周波数です。
ここで、Ncyclesは平均化された干渉周波数のサイクル数です。これは、Tacq = Ns×Tsとなるためです。ここで、Nsは平均化に使用したサンプル数で、Tsはサンプリング間隔です。式 (1) は以下のとおりになります。
または
式 (4) はサンプル数、および平均化で特定の干渉周波数を除去するサンプリング間隔数の組み合わせです。たとえば、Ncycles = 3とNs = 40を使用する60 Hz除去について、以下のとおり最適なサンプルレートを計算できます。
したがって、1.25 ms (または800サンプル/s) のサンプリング間隔で集録した40サンプルの平均は、集録データで60 Hzノイズを除去します。同様に、800サンプル/s (10読み取り/s) で集録した80サンプルの平均は、50 Hzと60 Hzの両方の周波数を除去します。平均化など、ローパスデジタルフィルタ処理技術を使用する場合、グラウンドループで発生するオフセットのように結果として生じるデータにはDC誤差がないことは想定できません。つまり、測定システムのノイズ問題が平均化によって解決されている場合でも、そのシステムにはDCオフセット誤差が残っている可能性があります。そのため、このシステムで測定に絶対確度が重要であるかどうかを確認する必要があります。