From Saturday, Nov 23rd 7:00 PM CST - Sunday, Nov 24th 7:45 AM CST, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
From Saturday, Nov 23rd 7:00 PM CST - Sunday, Nov 24th 7:45 AM CST, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
À mesure que l’électrification de l’automobile continue de s’accélérer, les ingénieurs du secteur doivent relever de nouveaux défis en matière de test pour les groupes motopropulseurs de véhicules électriques à batterie (BEV) qui n’existaient pas auparavant avec les groupes motopropulseurs traditionnels.
Plusieurs approches de banc de test existent pour fournir des commandes d’alimentation électrique. Dans cet article, nous discutons de ces approches et des avantages de l’utilisation des émulateurs de batterie nouvelle génération de NI pour tester de nouveaux sous-systèmes de propulsion de véhicules.
Initialement, un groupe motopropulseur VE ressemblait plus ou moins à un système de propulsion traditionnel : il disposait d’un propulseur (moteur), d’une transmission, d’une source de carburant (essence) et d’un châssis mécanique. Des développements plus récents incluent le remplacement du moteur à combustion interne (MCI) par un ou plusieurs moteurs électriques, l’utilisation de nouvelles formes de transmissions et de contrôle de couple, ainsi que l’utilisation d’un stockage d’énergie amélioré (batteries) faisant office de source de carburant.
Tous les nouveaux composants du groupe motopropulseur, y compris le moteur, la transmission et le châssis, sont rigoureusement testés dans des conditions difficiles afin de garantir une fiabilité élevée.
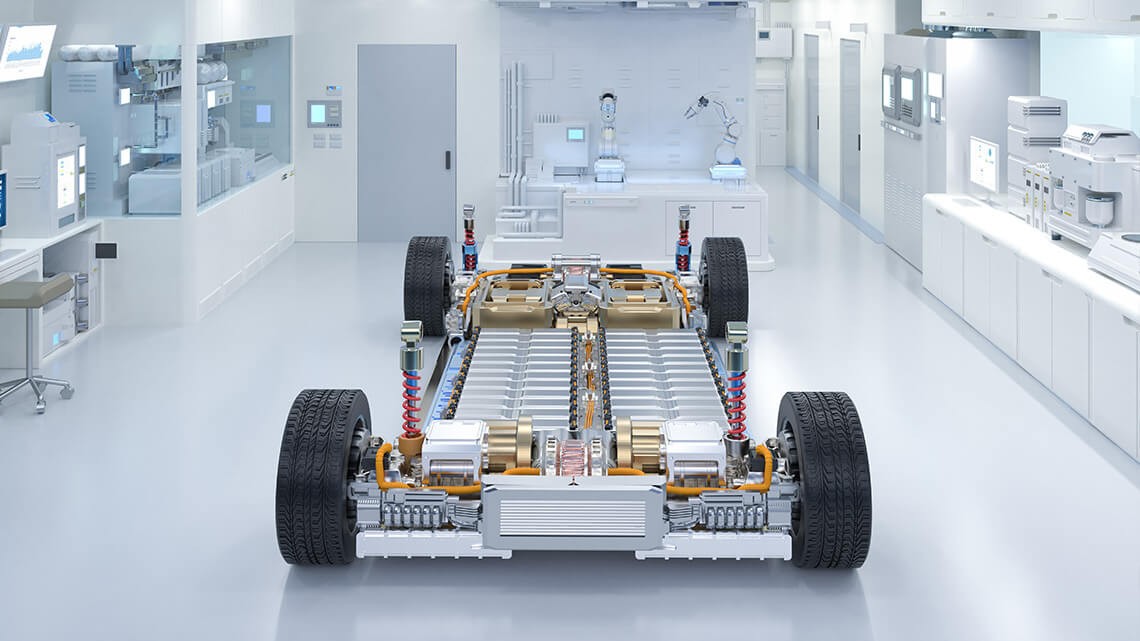
Figure 1. Un châssis et un groupe motopropulseur pour véhicule électrique moderne. Image fournie par Lucid Motors
Les architectures modernes des systèmes de propulsion sont fondamentalement différentes des solutions traditionnelles et présentent de nouveaux défis et différents risques. Les groupes motopropulseurs pour véhicules électriques nécessitent de tenir compte de considérations de sécurité différentes par rapport aux systèmes de propulsion traditionnels.
En fonctionnement normal, les groupes motopropulseurs traditionnels à combustion ont besoin de carburants à base de pétrole et émettent des fumées toxiques, qui doivent être contrôlées avec précaution. En comparaison, un groupe motopropulseur pour véhicule électrique ne génère pas d’éléments toxiques ou d’émissions en fonctionnement normal, mais présente des considérations de sécurité supplémentaires telles que la formation, l’installation et la manutention de systèmes haute tension. De plus, l’utilisation d’une batterie réelle lors du test des moteurs et des systèmes mécaniques introduit un certain risque de défaillance : un dispositif défectueux pourrait libérer des gaz toxiques et des fluides corrosifs caustiques. Ces gaz et fluides pourraient s’évacuer de manière exothermique, provoquant de la fumée, un incendie ou une explosion.
Autrement dit, il est plus judicieux d’utiliser un émulateur de batterie pour remplacer le composant de stockage d’énergie afin d’atténuer ces risques. Cette approche renforce la sécurité, réduit les délais de test et fournit des résultats plus reproductibles.
Lors du test de composants tels que des capteurs, des transmissions ou d’autres dispositifs mécaniques, il est courant de disposer d’un banc d’essai (banc de test) équipé d’un moteur d’entraînement. Grâce à cette configuration, il est possible de simuler la puissance mécanique du moteur et/ou du propulseur et un deuxième moteur d’entraînement afin de simuler la charge mécanique et/ou l’inertie des roues.
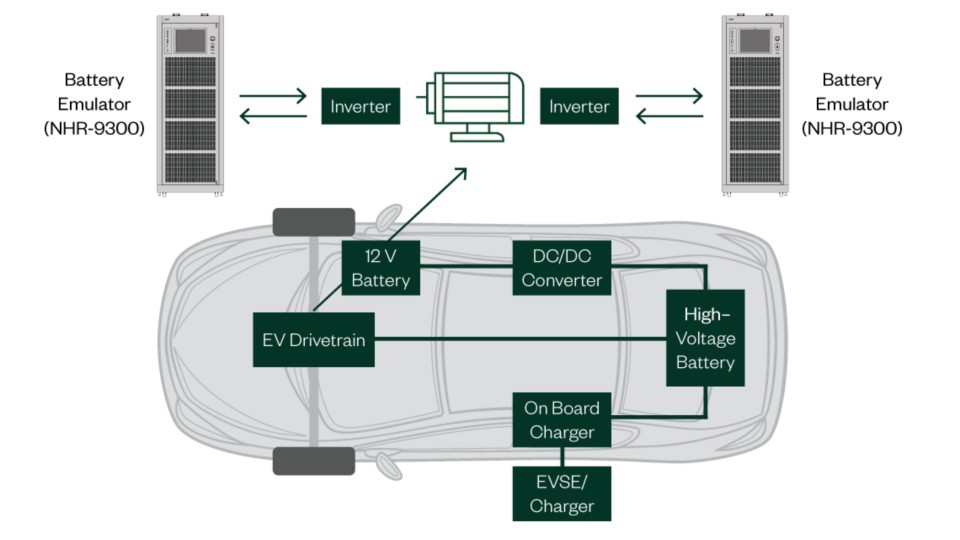
Figure 2. Diagramme d’un VE
Lors du test d’un skateboard, le moteur d’entraînement est intégré dans le skateboard, qui ne nécessite alors qu’un moteur secondaire pour simuler les roues. Cette deuxième configuration est souvent appelée dynamomètre, ou « dyno ». Les dynos sont utilisés depuis de nombreuses années pour tester les véhicules ICE traditionnels.
De même, les premiers groupes motopropulseurs pour véhicules électriques dotés de flux de puissance unidirectionnels ont permis d’utiliser une alimentation traditionnelle. L’alimentation traditionnelle peut agir comme une batterie et il est possible d’utiliser un dyno conventionnel pour absorber la puissance mécanique générée par la charge du moteur d’entraînement secondaire.
Figure 3. Bus CC commun
Ces premières approches de test de groupe motopropulseur pour véhicules électriques ont rapidement évolué vers une topologie de bus CC courant, comme illustré dans la Figure 3. Cette topologie tente de capturer et de réutiliser l’énergie électrique plutôt que de la dissiper sous forme de chaleur (pertes). Puisqu’elle est basée sur un ou plusieurs dispositifs unidirectionnels, toute défaillance ou limitation de performances, par exemple de l’unité sous test (UUT) ou d’un autre dispositifs, a un impact sur l’ensemble de la configuration de test.
De plus, la force contre-électromotrice présente lors de la descente en rampe ou le freinage simulé du moteur peut endommager le dispositif. Enfin, sans isolation entre l’entrée et la sortie, le bruit, les harmoniques ou d’autres instabilités peuvent affecter le bus CC ainsi que la sortie ou l’entrée, respectivement. Tous ces facteurs peuvent facilement fausser les résultats de test et créer de mauvaises conditions de groupe motopropulseur.
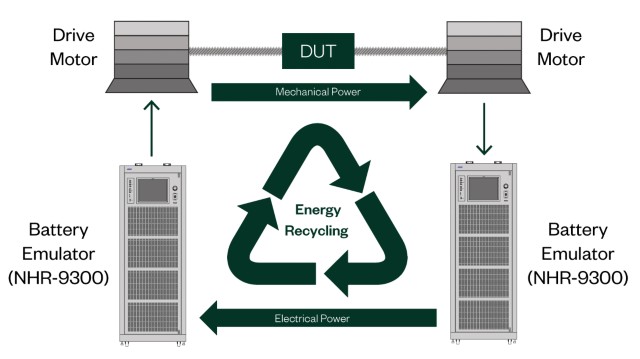
Contrairement à la méthode traditionnelle décrite précédemment, l’émulation moderne de batterie de NI fournit une solution bidirectionnelle unique qui permet de mieux simuler les conditions réelles de stockage d’énergie dans une batterie et d’alimentation des roues. Comme illustré dans la Figure 4, cette approche bidirectionnelle fournit une isolation entre l’entrée et la sortie, éliminant ainsi les points de défaillance uniques dans la configuration de test et acceptant automatiquement toute force contre-électromotrice générée par l’UUT.
Figure 4. Simulation de batterie de groupe motopropulseur
Par rapport au bus CC commun de la Figure 3, les voies d’entrée et de sortie séparées de la Figure 4 éliminent l’incertitude du test et permettent aux ingénieurs de test d’analyser les paramètres de performances en toute confiance. Cette approche est particulièrement importante pour le freinage régénératif, la capture d’énergie d’inertie du moteur et d’autres situations nécessitant de courtes rafales de flux de puissance dans un sens ou dans l’autre.
Les niveaux de puissance et de tension passent d’un niveau traditionnel de 300/400 V CC à 800/1 000 V CC. Des tensions plus élevées permettent une charge plus rapide et un transfert de puissance accru tout en réduisant le poids du véhicule.
Par exemple, en 2019, la plupart des BEV disponibles étaient similaires à la Model 3 de Tesla et à la Chevy Bolt de GM, présentant une tension nominale d’environ 350 V CC, alors que Porsche annonçait l’architecture Taycan utilisant un système de batterie plus performant de 800 V CC. Cette tension plus élevée permet de transférer près de trois fois la puissance supplémentaire avec la même taille de câble. Porsche a démontré cet argument avec un système IONITY se chargeant à 350 kW, soit près du triple des 120 kW disponibles via d’autres réseaux de superchargeurs « rapides ».
Nous nous attendons à ce que les véhicules 800 V et 350 V puissent être rechargés à une station-service uniquement électrique de la même manière que les voitures à essence et diesel aujourd’hui.
Les ingénieurs doivent garder cette réalité de double tension à l’esprit lors de la spécification des exigences d’alimentation, car de nombreux systèmes de test haute puissance ne sont conçus que pour une seule gamme. Le choix d’un système capable de fournir à la fois des niveaux de tension traditionnels et élevés garantit que l’équipement approprié est disponible pour les besoins actuels et à venir. Il est tout aussi important qu’un système d’émulation de batterie réagisse avec une réponse de tension rapide aux changements de courant ou de consommation d’énergie en vue de simuler avec précision le système de stockage électrique (batterie).
Figure 5. Système de test automatisé utilisant la source et la charge circa 2006
Les constructeurs automobiles ont considérablement augmenté la capacité relative des blocs batterie de leurs véhicules afin de réduire « l’angoisse de l’autonomie ». Par exemple, la Nissan Leaf 2019 est dotée d’une batterie 50 % plus grande que les anciens modèles de 40 kW et la Model S de Tesla dispose d’une batterie de 100 kW, soit 66 % plus grande que la batterie d’origine de taille standard.
La capacité et les performances des batteries s’améliorent constamment, ce qui suggère que les ingénieurs doivent tenir compte de la flexibilité et de la programmabilité dans le choix d’une solution d’émulation de batterie. En particulier, il est préférable que les ingénieurs de test ne fassent pas de compromis en n’utilisant pas de résistances ou en exploitant des valeurs de résistance fixes. Si ce compromis est fait, tous les tests ne simulent pas précisément les batteries d’aujourd’hui et ne simuleront certainement pas avec exactitude les batteries améliorées de demain.
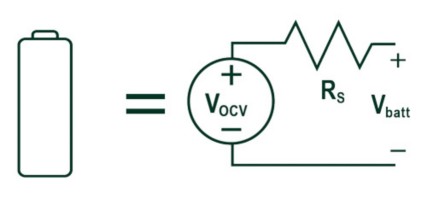
Figure 6. Modèle RINT (par rapport aux autres modèles)
Le modèle RINT (résistance interne) fournit une simulation de la résistance chimique interne de la batterie, ainsi que des résistances de bloc batterie supplémentaires créées par les connexions internes, les contacteurs et les composants de sécurité.
Comme le montre la Figure 6, le modèle RINT peut être implémenté avec une source bidirectionnelle réelle
(Vocv) et une résistance série programmable (Rs). Ce modèle est suffisant pour comprendre les principales caractéristiques des résistances basées sur batterie et des résistances de bloc batterie lors du test de systèmes de groupe motopropulseur.
Bien que le nombre de modèles mathématiques ait augmenté, ces modèles plus complexes sont utilisés pour comprendre les caractéristiques électrochimiques des batteries, dont les nuances ont peu d’impact sur le système global par rapport à la résistance totale du bloc batterie.
Les émulateurs de batterie NI sont dotés de ce modèle RINT équivalent fournissant un mode « émulation de batterie » programmable électroniquement. Nécessitant uniquement deux termes simples (Vocv et Rs), l’émulation de batterie ajuste automatiquement la tension aux bornes (Vbatt) en fonction de la direction et du niveau de courant (Icharge).
Vbatt = Vocv + Rs * Icharge
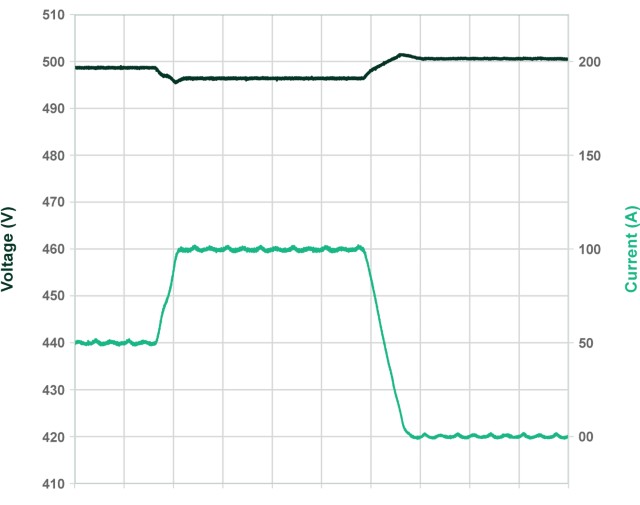
Comme dans une véritable batterie, les émulateurs de batterie NI ajustent la tension de sortie en fonction de la direction et de l’amplitude du flux de courant.
Le courant est indiqué en rouge sur la Figure 7, en commençant par le courant tiré de la batterie simulée (50 A), en augmentant jusqu’à un courant plus élevé (100 A), pour finalement retomber à zéro. La sortie a été configurée pour simuler 5 m2 de résistance. La tension de sortie (indiquée en bleu) montre la sortie lorsqu’elle suit ces variations de courant et fournit la chute de tension appropriée aux bornes. Cet ajustement automatique de la tension de sortie améliore la simulation des caractéristiques réelles d’un bloc batterie, en particulier par rapport aux systèmes de bus CC et de simulation source/charge courants.
Figure 7. Performances du modèle RINT
Les systèmes d’émulation de batterie de NI sont modulaires, répondant ainsi aux niveaux de tension et de courant requis par vos besoins en matière de test. Les modèles plus puissants fournissent une double gamme, ce qui permet à l’équipement d’émuler les batteries d’aujourd’hui et fournit l’outil approprié qui se développe au même rythme que les augmentations de tension et de puissance des batteries.
En outre, NI fournit une large gamme d’options de contrôle logiciel, permettant à cet étage de puissance d’être entièrement intégré au dynamomètre et aux autres composants du système de test.
Tous les systèmes d’émulation de batterie NI sont conçus pour fonctionner de manière entièrement indépendante et peuvent être mis en parallèle, augmentant ainsi la puissance maximale et la capacité de courant au niveau requis. Cette extension modulaire rendue possible grâce à la mise en parallèle garantit que vous pouvez commencer à tester aux niveaux d’application actuels, tout en sachant que des capacités supplémentaires sont disponibles si nécessaire à l’avenir.
Par exemple, comme illustré dans la Figure 8, trois systèmes peuvent être utilisés comme trois voies de test distinctes, une voie de test à trois fois la puissance, ou configurés comme deux voies, l’une agissant comme deux fois la puissance et l’autre comme une voie de test distincte. Le système NHR-9300 permet de combiner jusqu’à 12 voies de cette manière afin d’obtenir une puissance totale maximale de 2,4 mégawatts.
Les systèmes sont pérennes, dimensionnés pour répondre aux besoins actuels et aux niveaux de puissance futurs, et ce sans nécessiter le remplacement de l’ensemble du système.
Figure 8. Systèmes pérennes
NI fabrique également des systèmes basse consommation avec une large gamme d’options de tension. Le cycleur et l’émulateur modulaire de module de batterie CC moyenne tension NHR-9200 est extensible en termes de tailles de bloc de 8 kW ou 12 kW et offre des options de tension de 40 V à 600 V CC. Ce système utilise les mêmes drivers, commandes d’écran tactile et options logicielles, ce qui le rend idéal pour les systèmes d’émulation de batterie haute et basse puissance.
Contrairement aux systèmes concurrents qui sont souvent spécialement conçus pour une application, les systèmes de test haute puissance de NI garantissent une valeur à long terme en fournissant une double gamme, comme le montre la Figure 8. La puissance totale de 100 kW par module est disponible de 300 V à 600 V dans la gamme de courant élevé et de 600 V à 1 200 V dans la gamme de haute tension. Grâce à la double gamme, les groupes motopropulseurs pour véhicules électriques actuels (400-500 V) et les modèles nouvelle génération (800-1 000 V) peuvent être facilement testés à l’aide du même équipement.
Tous les émulateurs de batterie NI peuvent être facilement intégrés à des plates-formes de test existantes ou utilisés comme étage de puissance pour de nouvelles plates-formes de test. Pour ce faire, NI fournit des drivers entièrement documentés utilisant des langages IVI ou SCPI ainsi que des exemples, des applications et un support d’intégration.
NI dispose également de plusieurs partenaires d’intégration qui connaissent notre matériel et peuvent vous fournir un système de test clé en main. Ces intégrateurs développent des systèmes entièrement personnalisés en utilisant les capteurs matériels et les composants de montage spécifiés.
Tous les émulateurs de batterie NI implémentent le modèle RINT, ou « effet de résistance en série », afin de fournir la simulation de batterie la plus précise. En outre, les solutions d’émulation de batterie NI sont régénératrices, ce qui signifie que toute l’énergie circulant dans le système est recyclée en énergie d’installation propre et utilisable.
Les groupes motopropulseurs pour véhicules électriques évoluent et présentent de nouveaux défis en matière de test. Les niveaux de tension et de puissance changent en raison de la charge rapide et des performances du véhicule. Les approches traditionnelles de test de groupe motopropulseur reposent sur des dispositifs unidirectionnels qui présentent des inconvénients et des limites. L’émulation de batterie moderne est une approche bidirectionnelle isolée, capable de gérer la force contre-électromotrice et une topologie plus robuste.
NI fournit des solutions d’émulation de batterie nouvelle génération disposant des capacités suivantes :

Tableau 1. Résumé des approches de test de groupe motopropulseur pour véhicules électriques