Altran et NI démontrent la faisabilité du test HIL de systèmes ADAS avec fusion de capteurs
Aperçu
À mesure que les véhicules s’engagent sur la voie de l’autonomie, l’industrie doit répondre au besoin croissant d’effectuer des tests HIL (Hardware-In-the-Loop) pour valider et vérifier les fonctionnalités des systèmes d’aide à la conduite (ADAS), qui joueront un rôle central dans la conduite autonome. Ce White Paper offre un aperçu du concept HIL pour les systèmes d'aide à la conduite automobile (ADAS) dotés de fusion de capteurs, dévoile les principales conclusions à tirer des premières initiatives de recherche, et met en avant les éléments clés de niveau système utilisés dans l'implémentation de la solution.
Contenu
- Définition de la fusion de capteurs
- Quelle utilisation pour la fusion de capteurs ?
- Suite ADAS HIL Test Environment (AHTES)
- Présentation des composants
- Conclusion
- Ressources
Définition de la fusion de capteurs
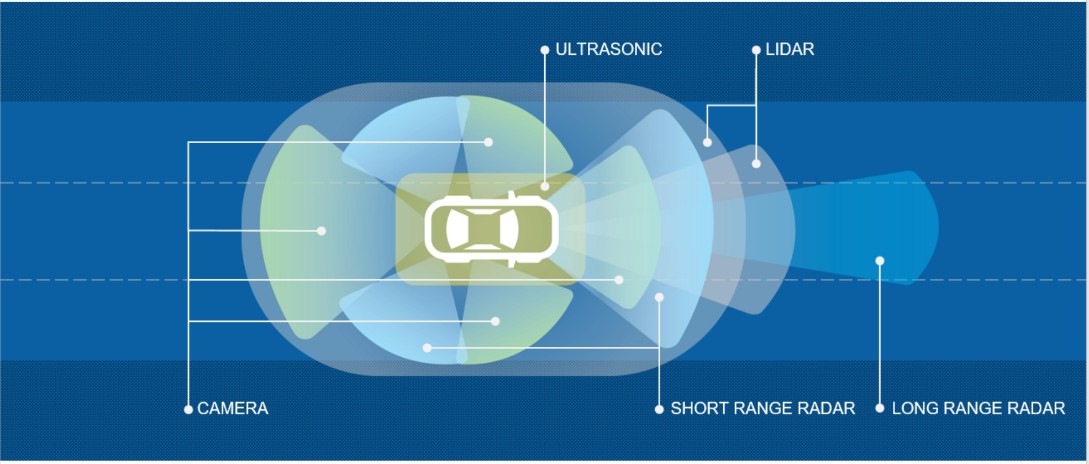
De nos jours, de nombreuses voitures sont dotées de systèmes ADAS basés sur divers capteurs comme le radar, les caméras, le LIDAR, ou les ultrasons. En général, chacun de ces capteurs remplit une fonction bien définie et ne partage que rarement des informations avec les autres capteurs. La quantité d'informations que le conducteur reçoit est proportionnelle au nombre de capteurs utilisés. Lorsque les capteurs fournissent suffisamment d’informations et que la communication est fonctionnelle, il est possible de créer un système autonome à l’aide d’algorithmes intelligents.
La fusion de capteurs correspond à la somme des informations transmises par les différents capteurs et permet de fournir une vision plus claire du milieu environnant. Cette technologie est indispensable pour atteindre l’objectif d’amélioration de la fiabilité des fonctions de sécurité et de l’efficacité des systèmes de conduite autonome.
Figure 1. Visualisation de l'environnement de la voiture
Quelle utilisation pour la fusion de capteurs ?
La fusion de capteurs peut se révéler utile quel que soit le type de capteur. L’exemple le plus caractéristique est celui de la fusion des informations provenant d’une caméra avant et d’un radar avant. Une caméra qui fonctionne dans le spectre visible subit une dégradation de ses performances en présence de pluie, de brouillard dense, de lumière éblouissante du soleil et en l'absence de lumière, mais ses performances sont très fiables lorsqu’il s’agit de reconnaître les couleurs (signalisation routière horizontale, par exemple). Le radar permet de détecter les distances, même avec une faible résolution, et ses performances ne sont pas sensibles aux conditions environnementales.
Les fonctions ADAS qui utilisent fréquemment la fusion des capteurs de la caméra avant et du radar comprennent :
- Contrôle de croisière adaptatif (ACC) — ce système de contrôle de croisière pour le véhicule s’adapte à la vitesse aux conditions du trafic. La vitesse est réduite lorsque la distance avec le véhicule précédent descend en-dessous du seuil de sécurité. Lorsque la route est dégagée, ou la distance avec l'autre véhicule est acceptable, le système ACC contrôle l’accélération du véhicule jusqu’à atteindre la vitesse sélectionnée.
Le freinage autonome d’urgence (AEB – Autonomous Emergency Braking) — il contrôle le système de freinage en réduisant la vitesse en cas de collision certaine ou en alertant le conducteur dans les situations critiques.
Suite ADAS HIL Test Environment (AHTES)
La validation de systèmes complexes requiert l’installation d’un environnement de test adéquat capable de simuler efficacement les capteurs pour contrôler le comportement du véhicule dans des conditions réelles.
À l’aide des technologies NI et d’un simulateur 3D de scénarios de routes virtuelles, la société Altran Italia a intégré un simulateur d’objets radar innovant dans une installation HIL, afin de créer un testeur (basé sur scenario) qui synchronise parfaitement les données caméra et radar pour valider des algorithmes de fusion de capteurs.
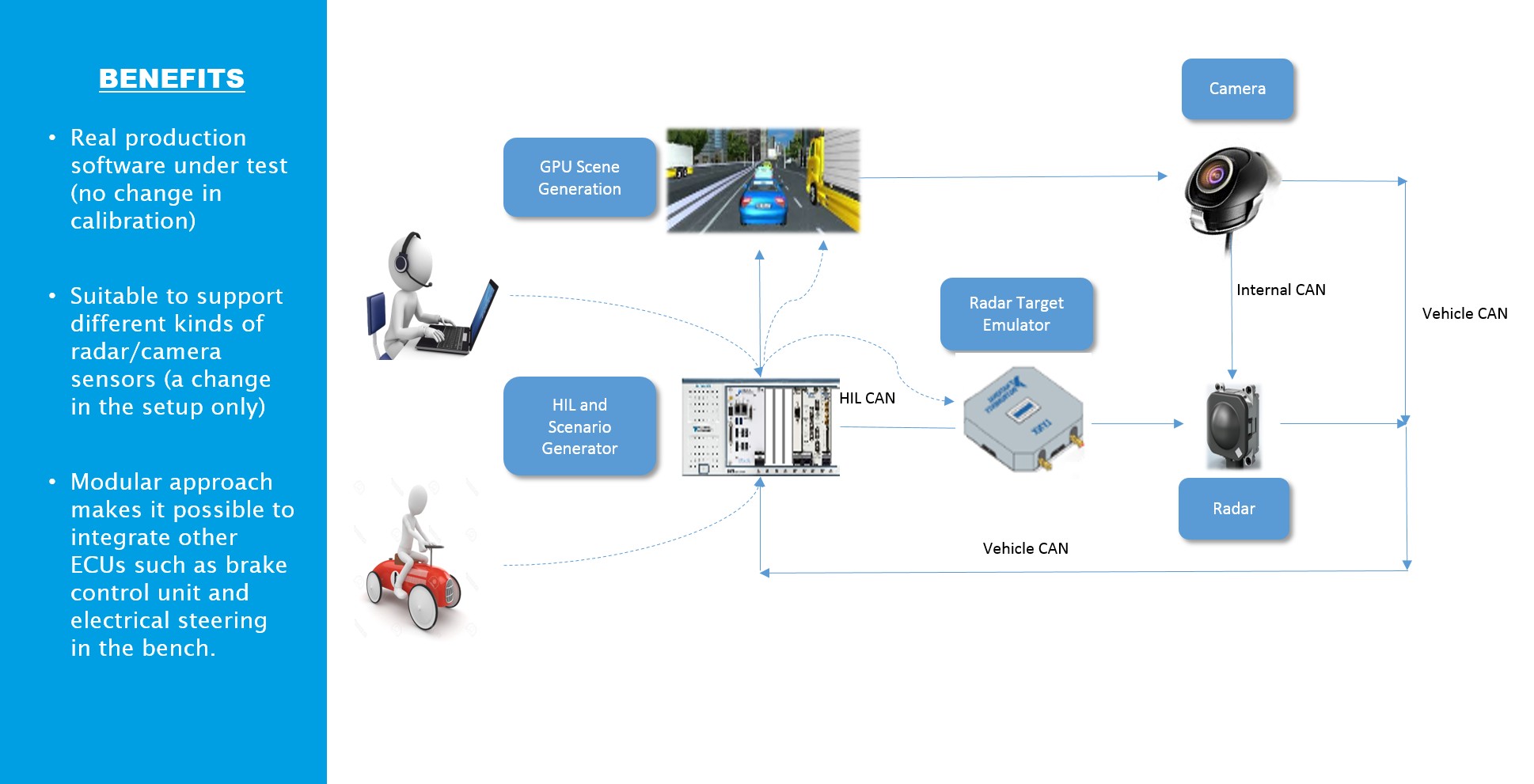
Figure 2. Solution de test HIL ADAS par ALTRAN-NI
Le scénario 3D est construit sur le moteur Unity 3D Graphic Engine, un moteur de jeu multi-plateforme développé par Unity Technologies. Totalement configurable, ce moteur permet la personnalisation de paramètres tels que le nombre de voies, les conditions d’éclairage et le type de piste. Un éventail d’autres environnements de modèles graphiques sont également présents sur le marché et peuvent être utilisés à des fins similaires (IPG Carmaker et TASS PreScan par exemple).
Le moteur graphique reproduit la scène du point de vue d’une caméra placée sur le pare-brise d’un véhicule. Il est possible de modifier la scène en jouant sur la hauteur par rapport au sol et sur le champ de vision de la caméra. Un obstacle peut également être inséré (un véhicule par exemple) à une distance donnée de la caméra, en lui donnant une vitesse prédéfinie.


Figure 3. Scénario du moteur graphique Unity
Pour assurer le contrôle du véhicule, le moteur graphique reçoit la position des pédales de frein et d’accélérateur en plus de l’angle de braquage. Un système PXI recueille les données en plus des signaux provenant du volant et des pédales (Logitech G29). Le modèle dynamique de véhicule, intégré au moteur graphique, est largement configurable.
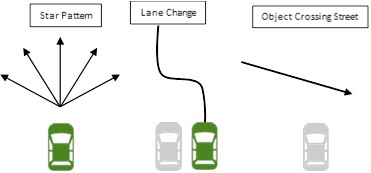
Figure 4. Manœuvres standard
Conformément au scénario d’obstacles sélectionné (les exemples ci-dessus servent de base de départ), le moteur graphique transmet la vitesse du véhicule et les informations dont le VRTS a besoin pour produire un signal RF. Toutes les données d’entrée/sortie sont échangées avec le PXI à l’aide d’un protocole propriétaire qui peut être changé si nécessaire.
Pour récupérer les informations de cibles radar (distance, surfaces équivalentes radar, angle d’arrivée et vitesse) à partir du générateur de scénarios, ce système utilise le protocole CAN pour communiquer avec le PXI-8512/2. Le PXI-8512/2 est une interface CAN/CAN-FD avec 2 ports haute vitesse pour les systèmes PXI, qui permet d’émettre et de recevoir des trames de données de bus CAN à 1 Mbit/s. Les informations sont envoyées au générateur d’obstacles, seulement si les informations sur les cibles changent entre deux lectures consécutives.
En plus d’envoyer les données au simulateur d’obstacles et de recueillir les signaux des pédales et du volant, le PXI simule également les messages CAN que le radar et la caméra envoient et reçoivent sur un réseau privé du véhicule.
Les messages CAN sont synchronisés avec le scénario virtuel 3D et le générateur de cibles RF pour produire l’environnement approprié permettant de valider les données de caméras et radar modernes.
Présentation des composants
Voici de brèves descriptions de chaque composant du système et de la connexion/bus de communication :
- L’unité de contrôle moteur (ECU) pour radar — La mission première du capteur radar est de détecter les objets et de mesurer leur vélocité et leur position par rapport au mouvement du véhicule équipé du radar. Le capteur radar est un radar monostatique multimodes qui utilise la bande de fréquence de 76 GHz et qui est doté de six antennes radar fixes. Le capteur détecte les autres véhicules à une distance d’environ 250 mètres. Le radar est équipé d’une lentille chauffante qui garantit la disponibilité complète du capteur, même dans de mauvaises conditions météorologiques (neige et glace). La vitesse relative des objets est mesurée grâce à l’effet Doppler (changement de fréquence entre les signaux réfléchis et émis), et la distance de l’objet peut être déterminée à l’aide du décalage temporel.
L’ECU assure la fusion des capteurs avec les données de la caméra et prend en charge les fonctions telles que la régulation de vitesse adaptative (ACC) et le freinage autonome d’urgence (AEB).
- L’ECU de caméra—L’ECU de la caméra acquiert des images de l’environnement et fournit des informations (distance par rapport aux lignes de délimitation des voies et aux autres objets). Ces informations sont envoyées à l’ECU du radar pour fusion des données de capteurs mais, dans certains cas (signalisation routière et maintien dans la file de circulation par exemple), l’ECU de la caméra fonctionne seul. Dans ce cas, il envoie des messages CAN sur le bus CAN du véhicule.
- Générateur de scénarios vidéos—Le générateur de scénarios vidéos est un simulateur doté d'un système du véhicule qui reçoit des signaux d’entrée envoyés par le PXI-8512/2 via communication CAN et transmet des informations sur l’environnement simulé. Les données radar (distance, surface équivalente radar ou SER, l’angle d’arrivée et la vitesse) sont générées pendant la simulation et calculées en temps réel en fonction du scénario vidéo. Le panneau de configuration situé sur le deuxième écran permet de gérer la connexion avec le PXI-8521/2, modifier les conditions météorologiques, ajuster la position du radar et faire apparaître un nouveau véhicule à une vitesse et distance prédéfinies.
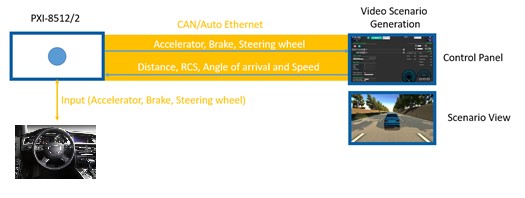
Figure 5. Émulation des communications du véhicule
Ce simulateur a été développé à l’aide du moteur Unity 3D Graphic Engine, un moteur de jeu multi-plateforme de la société Unity Technologies. Le scénario vidéo peut être intégré à n’importe quelle plate-forme, plugin ou matériel de tiers (tels que le Logitech G29 illustré ci-dessus), en utilisant une approche modulaire.
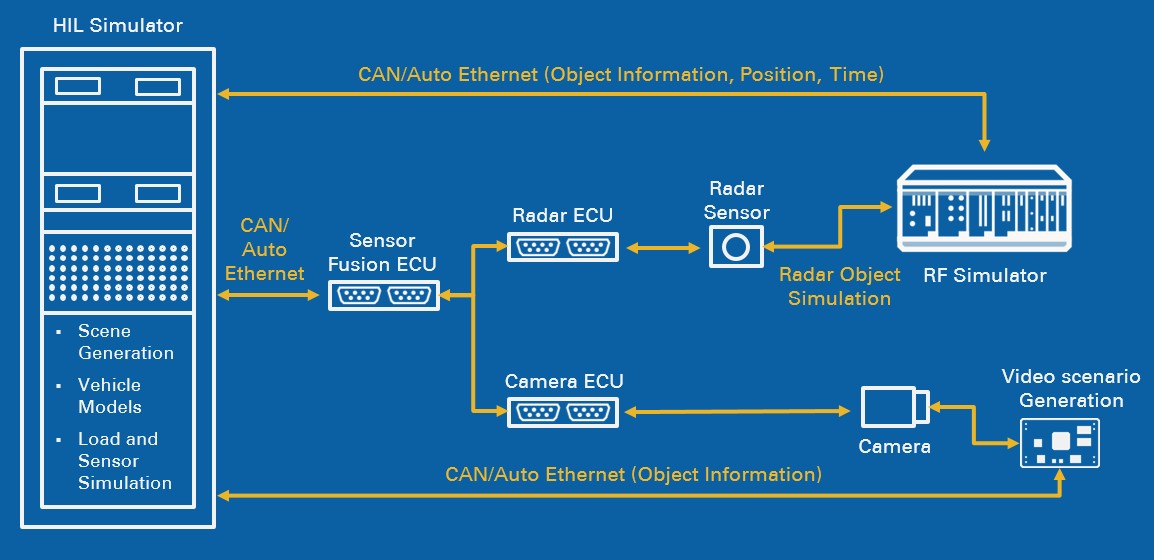
Figure 6. Environnement de test HIL ADAS
Le simulateur d’objets radar permet d’effectuer des tests et des mesures dans le système HIL. Les utilisateurs peuvent tirer parti de la flexibilité, la modularité et l'évolutivité du système NI pour l’intégrer facilement à d’autres systèmes d’E/S dans le cadre de la création d’un testeur HIL complet d’applications de conception et de test de radar, et pour pouvoir utiliser un même système afin d'émuler la cible et mesurer le système radar, réduisant ainsi le coût des tests du matériel et du système.
Le système est capable de :
- Mesures RF pour la vérification des performances du capteur
- Analyse du signal : puissance isotrope rayonnée équivalente (EIRP), bruit, largeur du faisceau et fréquence
- Analyse Chirp : linéarité, sur-oscillement, enregistrement et tagging
- Simulateur de cible radar pour une vérification fonctionnelle du capteur
- Cibles uniques et multiples
- Distance fixe et variable
- Scénarios d’objets multiples (distance, vitesse, taille et angle d’arrivée)
- Scénarios cibles personnalisables
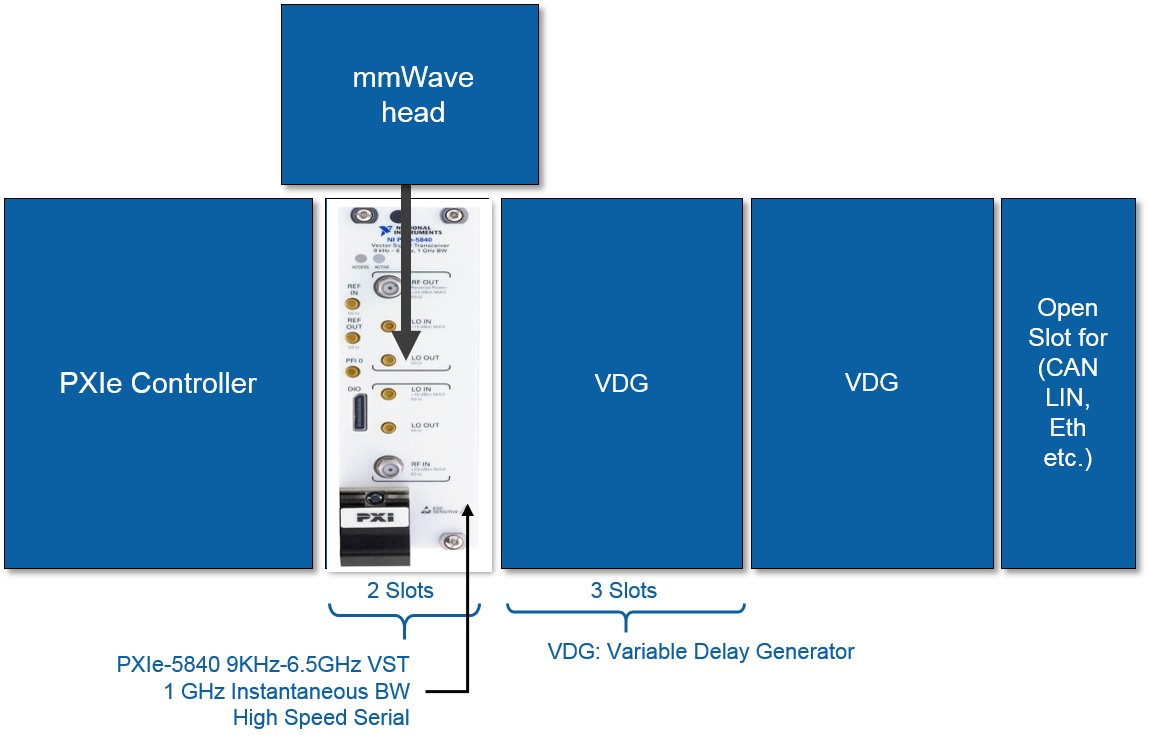
Figure 7. Architecture d’un système pour deux cibles et angle unique
Dans la Figure 7, l’installation composée d’un transcepteur de signaux vectoriels (VST) PXIe-5840 et d’une tête à ondes millimétriques (mmWave) permet de générer deux cibles qui présentent le même angle d’arrivée. Souple de conception, la plate-forme PXI permet d’étendre facilement le système pour traiter plusieurs cibles avec de multiples angles d’arrivée. Dans la Figure 8, la configuration avec quatre transcepteurs PXIe-5840 et quatre têtes à ondes millimétriques permet de simuler jusqu’à huit cibles différentes et quatre angles d’arrivée.
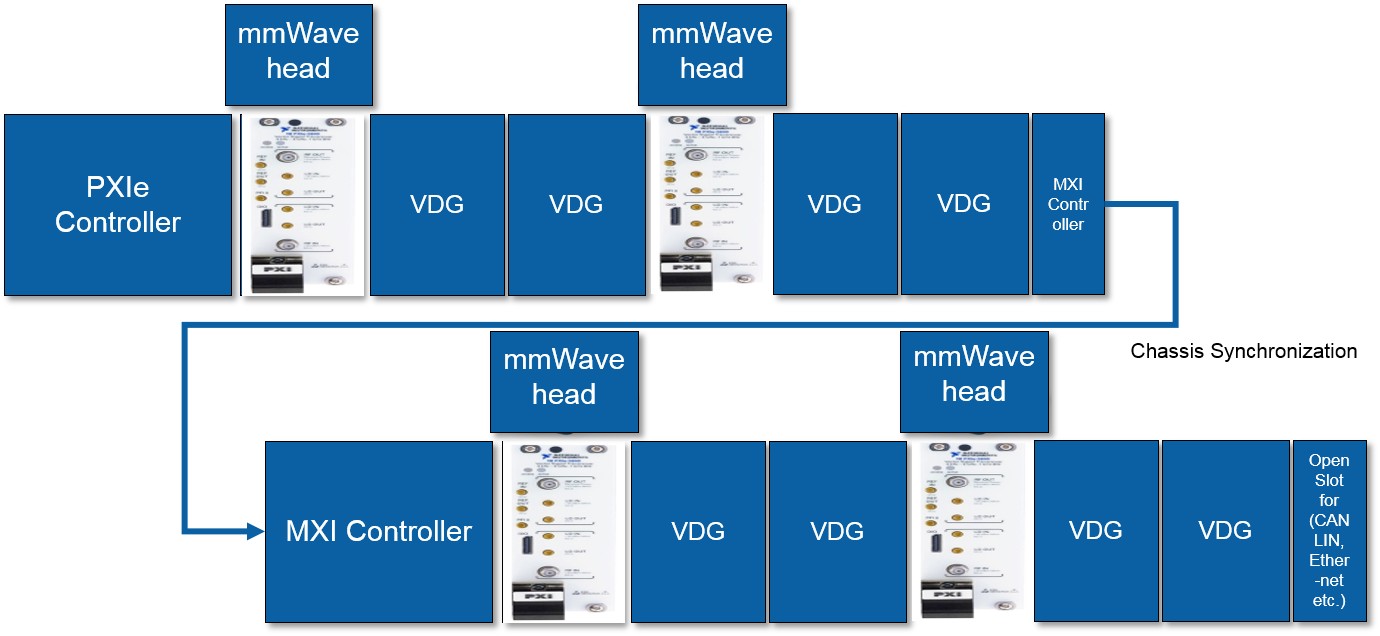
Figure 8. Architecture d’un système pour huit cibles et quatre angles d’arrivée
L’intégration du châssis de simulation d’objets radar peut s’effectuer via des bus de communication automobiles standard (CAN ou LIN) et d'autres types de communications industrielles requis pour le système HIL. Les constructeurs automobiles peuvent tirer parti de la modularité de la solution pour tester des scénarios complexes du monde réel, avec la possibilité de gérer plusieurs angles d’arrivée. Des manœuvres standard fournies par les directives du New Car Assessment Program (NCAP) peuvent être testées automatiquement, ce qui réduit le temps de test et les efforts consacrés.
Conclusion
La société Altran a montré qu’il est désormais possible de valider en laboratoire des systèmes (RADAR et caméras) autonomes ou intégrés.
Ces deux composants étant critiques pour la sécurité, la réalisation de ces tests en laboratoire, avant les tests sur le véhicule, représente une étape cruciale.
Valider de cette manière offre les avantages suivants :
- La capacité à anticiper la validation à une étape avant la disponibilité du véhicule pour permettre des actions correctives qui sinon surviendraient trop tard
- La durée totale de développement est fortement réduite, car les tests peuvent commencer avant même que le véhicule ne soit disponible
- Les coûts de développement sont réduits en disposant d’un système fonctionnant 24 heures sur 24 et 7 jours sur 7
- Des tests sans régression peuvent être effectués dans un temps considérablement réduit et avec un coût minimal comparé à l’utilisation du véhicule assemblé
Bien que la suite ADAS HIL Test Environment ait été créée par Altran basé sur les logiciels et le matériel NI pour la vérification et la validation, son utilisation ne se limite pas à ces domaines ; en fait, elle peut être utilisée pour étalonner les ECU afin de découvrir les paramètres des tests de véhicules.
Le système ADAS s’intègre totalement dans d'autres matériels HIL de NI, tels que le matériel SLSC (switch load signal conditioning) pour la standardisation et le routage des signaux, la commutation de charges et le conditionnement des signaux. Avec le logiciel de test temps réel VeriStand, il est possible d’intégrer chaque composant dans un framework qui interagit avec des systèmes HIL temps réel.
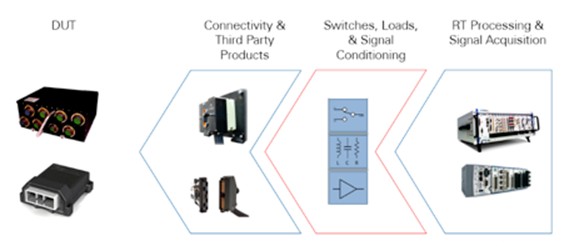
Figure 9. L’intégration du SLSC dans un système HIL
En outre, NI a étendu sa plate-forme avec un écosystème de partenaires leaders de l’industrie dans le secteur de la voiture connectée et des technologies automobiles avancées, telles que le test des systèmes d’infotainment, le test de systèmes de gestion de batterie, la communication V2X, les analyses de bruit et de vibrations des véhicules.
Figure 10. VX2, Lidar et GNSS pour la voiture connectée
Auteurs
Mario Amoruso (National Instruments)
Stefano Caiola (National Instruments)
Giuseppe Doronzo (Altran Italia)
Marino Difino (Altran Italia)
Réviseurs
Ram Mirwani (National Instruments)
Matteo Moriotti (Altran Italia)
Davide Palandella (National Instruments)
Ressources
- Altran Group
- Utiliser l'architecture SLSC pour ajouter des éléments supplémentaires au chemin du signal d'un système de test
À propos du groupe Altran
Leader mondial du conseil en ingénierie avancée, Altran propose à ses clients d’innover autrement en les aidant à développer, ou en développant pour eux les produits et les services de demain. Le Groupe accompagne ses clients sur l’intégralité de la chaîne de valeur du cycle de vie d’un projet, de l’idée à l’industrialisation.
Altran intervient depuis plus de 30 ans auprès des grands acteurs de nombreux secteurs : aérospatial, automobile, défense, énergie, ferroviaire, finance, sciences de la vie, télécommunications, etc.
En 2016, le groupe Altran a réalisé un chiffre d’affaires de 2120 milliards d’euros. Il compte actuellement plus de 30 000 collaborateurs dans plus de 20 pays.
Altran est implanté en Italie depuis 1996 et compte 2800 employés. Son siège social est à Rome et se la société trouve dans une grande partie du pays : Gênes, Turin, Milan, Trieste, Vérone, Padoue, Bologne, Modène, Pise, Florence, Naples, Pomigliano et Brindisi. En 2015, elle a généré 208 millions d’euros de ventes.
altran.com et altran.it