Considérations relatives au câblage sur site et au bruit pour les signaux analogiques
Aperçu
Contenu
- Types de sources de signaux et systèmes de mesure
- Mesure des sources de signaux connectées à la masse
- Mesure de sources flottantes (non référencées)
- Réduction du couplage du bruit dans les interconnexions
- Systèmes équilibrés
- Résolution des problèmes de bruit dans les configurations des mesures
- Techniques de traitement du signal pour la réduction du bruit
- Références
- En savoir plus
Types de sources de signaux et systèmes de mesure
L’équivalent électrique le plus fréquent produit par les circuits de conditionnement de signaux associés aux capteurs est de loin sous forme de tension. La transformation en d’autres phénomènes électriques tels que le courant et la fréquence peut être rencontrée dans les cas où le signal doit être transporté sur un long câblage dans des environnements difficiles. Étant donné que dans pratiquement tous les cas, le signal transformé est finalement reconverti en un signal de tension avant la mesure, il est important de comprendre la source du signal de tension.
N’oubliez pas qu’un signal de tension est mesuré comme la différence de potentiel entre deux points. Ce contexte est illustré à la Figure 1.
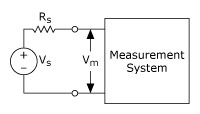
Figure 1. Source de signal de tension et modèle du système de mesure
Une source de tension peut être regroupée en deux catégories : mise à la masse ou non reliée à la masse (flottante). De même, un système de mesure peut être regroupé en deux catégories : mis à la masse ou référencé à la masse et non relié à la masse (flottant).
Source de signal mise à la masse ou référencée à la masse
Une source mise à la masse est une source dans laquelle le signal de tension est référencé à la masse du système du bâtiment. L’exemple le plus fréquent d’une source mise à la masse est tout instrument plug-in commun qui ne fait pas explicitement flotter son signal de sortie. La Figure 2 montre une source de signal mise à la masse.
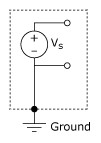
Figure 2. Source de signal mise à la masse
En général, les masses de deux sources de signal mises à la masse n’ont pas le même potentiel. La différence de potentiel de masse entre deux instruments connectés au même système d’alimentation d’un bâtiment est généralement comprise entre 10 mV et 200 mV, mais elle peut être bien plus élevée si les circuits de distribution d’alimentation sont incorrectement connectés.
Source de signal non reliée à la masse ou non référencée (flottante)
Une source flottante est une source dans laquelle le signal de tension n’est pas renvoyé à une référence absolue, telle que la terre ou la masse du bâtiment. Des exemples fréquents de sources de signaux flottantes sont les batteries, les sources de signaux alimentées par batterie, les thermocouples, les transformateurs, les amplificateurs d’isolement et tout instrument qui fait explicitement flotter son signal de sortie. Une source de signal non référencée ou flottante est illustrée à la Figure 3.
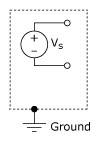
Figure 3. Source de signal flottante ou non référencée
Notez qu’aucun terminal de la source n’est référencé à la masse de la prise électrique. Ainsi, chaque terminal est indépendant de la terre.
Système de mesure différentiel ou non référencé à la masse
Un système de mesure différentiel, ou non référencé, n’a aucune de ses entrées liées à une référence fixe telle que la terre ou la masse d’un bâtiment. Les instruments portables alimentés par piles et les périphériques d’acquisition de données dotés d’amplificateurs d’instrumentation sont des exemples de systèmes de mesure différentiels ou non référencés. La Figure 4 montre l’implémentation d’un système de mesure différentiel à huit voies utilisé dans un périphérique Nl classique. Les multiplexeurs analogiques sont utilisés sur le chemin du signal pour augmenter le nombre de voies de mesure tout en utilisant un seul amplificateur d’instrumentation. Pour ce périphérique, la broche libellée AI GND, la masse de l’entrée analogique, est la masse du système de mesure.
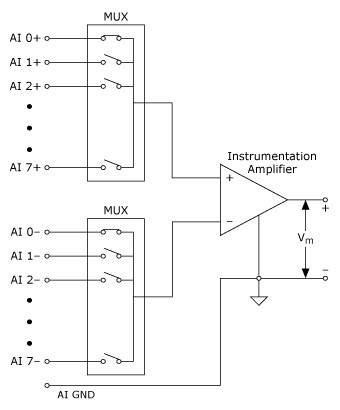
Figure 4. Système de mesure différentiel à huit voies
Un système de mesure différentiel idéal mesure uniquement la différence de potentiel entre ses deux terminaux, l’entrée positive (+) et l’entrée négative (-). Une tension de mode commun correspond à toute tension mesurée par rapport à la masse de l’amplificateur d’instrumentation qui est présente aux deux entrées de l’amplificateur. Une tension de mode commun est complètement rejetée (c’est-à-dire qu’elle n’est pas mesurée) par un système de mesure différentiel idéal. Cette capacité est utile dans la réjection de bruit, car du bruit indésirable est souvent introduit sous forme de tension de mode commun dans le circuit qui compose le système de câblage. En réalité, les matériels possèdent plusieurs facteurs de limitation, caractérisés par des paramètres comme la gamme de tension de mode commun et le taux de réjection de mode commun (CMRR), qui restreignent la capacité de réjection de la tension de mode commun.
La tension de mode commun Vcm est définie comme suit :
où V+ = la tension du terminal non inverseur du système de mesure par rapport à la masse du système de mesure, et où V- = la tension du terminal inverseur du système de mesure par rapport à la masse du système de mesure et CMRR en dB est défini comme suit :
Un circuit simple qui illustre le CMRR est illustré en Figure 5. Dans ce circuit, le CMRR en dB est mesuré par 20 log Vcm/Ven sortie, où V+ = V- = Vcm.
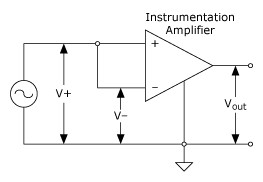
Figure 5. Circuit de mesure CMRR
La gamme de tension de mode commun limite la variation de tension autorisée à chaque entrée en fonction de la masse du système de mesure. Le non-respect de cette contrainte peut non seulement provoquer une erreur de mesure, mais aussi endommager certains composants du périphérique. Comme le terme l’indique, un rapport CMRR mesure la capacité d’un système de mesure différentiel à rejeter le signal de la tension de mode commun. Le CMRR est fonction de la fréquence et diminue généralement avec la fréquence. Le CMRR peut être optimisé en utilisant un circuit équilibré. Ce problème est abordé plus en détail plus loin dans cette note d’application. La plupart des périphériques d’acquisition de données spécifient le CMRR jusqu’à 60 Hz, la fréquence de la ligne électrique.
Système de mesure mis à la masse ou référencé à la masse
Un système de mesure mis à la masse ou référence à la masse est semblable aux sources mises à la masse étant donné que la mesure est effectuée par rapport à la masse. La Figure 6 illustre un système de mesure mis à la masse à huit voies. Il s’agit également d’un système de mesure asymétrique.
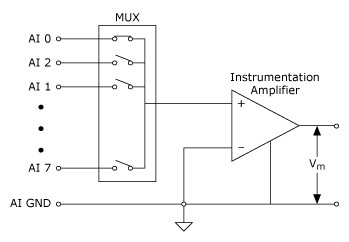
Figure 6. Système de mesure asymétrique référencé à la masse (RSE) à huit voies
Les périphériques d’acquisition de données emploient souvent une variante de la technique de mesure asymétrique : la méthode asymétrique non référencée (NRSE). Un système de mesure NRSE est illustré à la Figure 7.
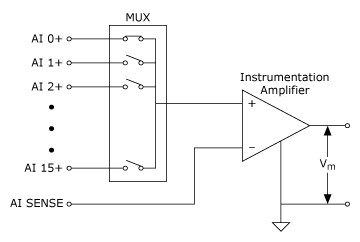
Figure 7. Système de mesure NRSE à huit voies
Dans un système de mesure asymétrique non référencé, les mesures sont toujours prises par rapport à une détection d’entrée analogique à un nœud (AI SENSE), mais le potentiel de ce nœud peut varier par rapport à la masse du système de mesure (AI GND). La Figure 7 montre qu’un système de mesure asymétrique non référencé à une voie est identique à un système de mesure différentiel à une voie.
Maintenant que nous avons défini les différents types de source de signal et systèmes de mesure, nous pouvons discuter du système de mesure approprié pour chaque type de source de signal.
Mesure des sources de signaux connectées à la masse
Le système de mesure le plus adapté à une source de signal mise à la masse est un système différentiel ou un système non référencé. La Figure 8 montre le piège de l’utilisation d’un système de mesure référencé à la masse pour mesurer une source de signal mise à la masse. Dans ce cas, la tension mesurée, Vm, est la somme de la tension du signal, Vs, et de la différence de potentiel, DVg, qui existe entre la masse de la source du signal et la masse du système de mesure. En règle générale, cette différence de potentiel n’est pas une tension continue ; le résultat est donc un système de mesure bruité présentant souvent les composantes fréquentielles de la ligne électrique (60 Hz) dans les mesures. Du bruit introduit par les boucles mises à la masse peut avoir à la fois des composants CA et CC, introduisant des erreurs d’offset et du bruit dans les mesures. La différence de potentiel entre les deux masses engendre un courant qui circule dans l’interconnexion. Ce courant s’appelle courant de boucle mise à la masse.
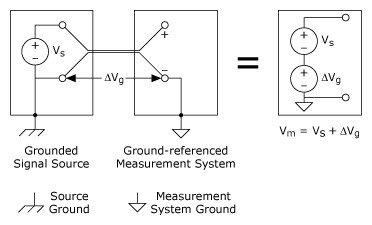
Figure 8. Source de signal mise à la masse mesurée à l’aide d’un système référencé à la masse introduit une boucle de masse
Un système référencé à la masse peut toujours être utilisé si les niveaux de tension du signal sont élevés et que le câblage de l’interconnexion entre la source et le périphérique de mesure a une impédance basse. Dans ce cas, la mesure de la tension du signal est altérée par la boucle mise à la masse, mais l’altération est acceptable. Vous devez faire attention à la polarité de la source de signal mise à la masse avant de le connecter à un système de mesure référencé à la masse, car la source du signal peut être court-circuitée à la masse, ce qui peut endommager la source du signal. Les considérations relatives au câblage sont abordées plus en détail plus loin dans cette note d’application.
Une mesure non référencée est fournie à la fois par les configurations de l’entrée différentielle (DIFF) et NRSE sur un périphérique d’acquisition de données typique. Avec l’une ou l’autre de ces configurations, toute différence de potentiel entre les références de la source et du périphérique de mesure apparaît comme une tension de mode commun au système de mesure et est soustraite du signal mesuré. Ceci est illustré à la Figure 9.
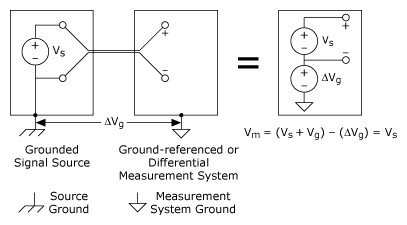
Figure 9. Système de mesure différentiel utilisé pour mesurer une source de signal mise à la masse
Mesure de sources flottantes (non référencées)
Les sources de signaux flottantes peuvent être mesurées à l’aide des systèmes de mesure différentiels et asymétriques. Toutefois, si vous utilisez un système de mesure différentiel, veillez à ce que le niveau de tension de mode commun du signal par rapport à la masse du système de mesure reste dans la gamme d’entrée de mode commun du périphérique de mesure.
Divers phénomènes, notamment les courants de polarisation d’entrée de l’amplificateur d’instrumentation, peuvent déplacer le niveau de la tension de la source flottante hors de la gamme valide des entrées d’un périphérique d’acquisition de données. Pour ancrer ce niveau de tension à une référence, des résistances sont utilisées, comme illustré en Figure 10. Ces résistances, appelées résistances de polarisation, fournissent un chemin CC entre les entrées de l’amplificateur d’instrumentation et la masse de l’amplificateur d’instrumentation. Ces résistances doivent être d’une valeur suffisamment grande pour permettre à la source de flotter par rapport à la référence de mesure (AI GND dans le système de mesure décrit précédemment) et ne pas charger la source de signal, mais suffisamment petite pour maintenir la tension dans la plage de l’étage d’entrée du périphérique. En règle générale, les valeurs comprises entre 10 kΩ et 100 kΩ fonctionnent bien avec des sources à faible impédance telles que des thermocouples et des sorties de module de conditionnement de signal. Ces résistances de polarisation sont connectées entre chaque fil et la masse du système de mesure.
Attention : La non-utilisation de ces résistances entraînera des lectures erratiques ou saturées (pleine échelle positive ou pleine échelle négative).
Si le signal d’entrée est en couplage direct, une seule résistance connectée de l’entrée (-) à la masse du système de mesure est requise pour satisfaire l’exigence du chemin de courant de polarisation, mais cela conduit à un système déséquilibré si l’impédance de la source du signal est relativement élevée. Les systèmes équilibrés sont souhaitables du point de vue de l’immunité au bruit. Par conséquent, deux résistances de valeur égale : l’une pour l’entrée signal haut (+) et l’autre pour l’entrée signal bas (-) à la masse, doivent être utilisées si l’impédance de la source du signal est élevée. Une seule résistance de polarisation est suffisante pour les sources en couplage direct à faible impédance telles que les thermocouples. Les circuits équilibrés sont abordés plus loin dans cette note d’application.
Si le signal d’entrée est couplé en courant alternatif, deux résistances de polarisation sont nécessaires pour satisfaire l’exigence de chemin de courant de polarisation de l’amplificateur d’instrumentation.
Les résistances (10 kΩ < R < 100 kΩ) fournissent un chemin de retour à la masse pour les courants de polarisation d’entrée de l’amplificateur d’instrumentation, comme le montre la Figure 10. Seul R2 est requis pour les sources de signaux à couplage direct. Pour les sources couplées en courant alternatif, R1 = R2.
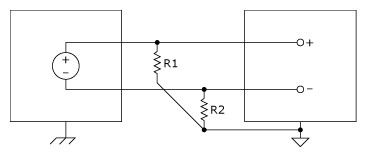
Figure 10. Source flottante et configuration d’entrée différentielle
Si le mode d’entrée asymétrique doit être utilisé, un système d’entrée RSE (Figure 11a) peut être utilisé pour une source de signal flottante. Aucune boucle de masse n’est créée dans ce cas. Le système d’entrée NRSE (Figure 11b) peut également être utilisé et est préférable du point de vue de la détection du bruit. Les sources flottantes nécessitent une ou des résistances de polarisation entre l’entrée AI SENSE et la masse du système de mesure (AI GND) dans la configuration de l’entrée NRSE.
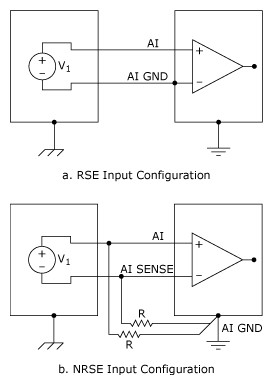
Figure 11. Source de signal flottante et configurations asymétriques
Un résumé graphique de la discussion précédente est présenté dans le Tableau 1.
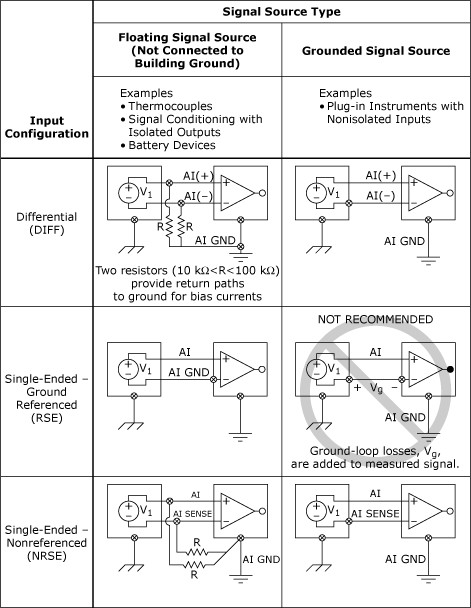
Tableau 1. Connexions d’entrée analogique
Remarque : La mise à la masse asymétrique référencée (RSE) n’est pas recommandée pendant l’utilisation d’une source de signal mise à la masse !
Attention : Des résistances de polarisation doivent être fournies lors de la mesure des sources de signaux flottantes dans les configurations DIFF et NRSE. Le non-respect de cette consigne entraînera des lectures erratiques ou saturées (pleine échelle positive ou pleine échelle négative).
En général, un système de mesure différentiel est préférable, car il rejette non seulement les erreurs induites par la boucle de masse, mais aussi le bruit capté dans l’environnement dans une certaine mesure. Les configurations asymétriques, en revanche, fournissent deux fois plus de voies de mesure, mais ne sont justifiées que si la magnitude des erreurs induites est inférieure à la précision requise des données. Les connexions d’entrée asymétriques peuvent être utilisées lorsque tous les signaux d’entrée répondent aux critères suivants.
- Les signaux d’entrée sont élevés (supérieur à 1 V)
- Le câblage du signal est court et traverse un environnement sans bruit ou est correctement blindé
- Tous les signaux d’entrée peuvent partager un signal de référence commun à la source
Les connexions différentielles doivent être utilisées lorsque l’un des critères ci-dessus n’est pas respecté.
Réduction du couplage du bruit dans les interconnexions
Même lorsqu’une configuration des mesures évite les boucles de masse ou la saturation de l’étage d’entrée analogique en suivant les directives ci-dessus, le signal mesuré inclura presque inévitablement une certaine quantité de bruit ou de signal indésirable « capté » de l’environnement. Cette situation est particulièrement vraie pour les signaux analogiques de bas niveau qui sont amplifiés à l’aide de l’amplificateur intégré disponible dans de nombreux périphériques d’acquisition de données. Pour aggraver les choses, les cartes d’acquisition de données PC ont généralement des signaux d’entrée/sortie numériques sur le connecteur d’E/S. Par conséquent, toute activité sur ces signaux numériques fournie par ou à la carte d’acquisition de données qui se déplace sur une certaine longueur à proximité des signaux analogiques de bas niveau dans le câble d’interconnexion lui-même peut être une source de bruit dans le signal amplifié. Afin de minimiser le couplage du bruit de cette source et d’autres sources étrangères, un schéma de câblage et de blindage approprié peut être nécessaire.
Avant de discuter du câblage et du blindage appropriés, il est essentiel de comprendre la nature du problème de couplage du bruit d’interférence. Il n’y a pas de solution unique au problème de couplage du bruit. De plus, une solution inappropriée pourrait aggraver le problème.
Un problème d’interférence ou de couplage du bruit est illustré à la Figure 12.
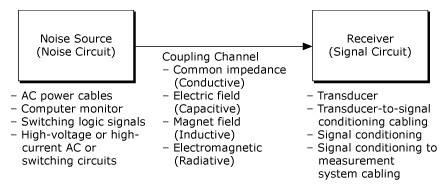
Figure 12. Diagramme du problème de couplage du bruit
Comme le montre la Figure 12, il existe quatre principaux mécanismes de « captation » ou de couplage du bruit : conducteur, capacitif, inductif et radiatif. Le couplage conducteur résulte du partage des courants de différents circuits dans une impédance commune. Le couplage capacitif résulte de champs électriques variant dans le temps à proximité du chemin du signal. Le bruit inductif ou couplé magnétiquement résulte de champs magnétiques variant dans le temps dans la zone entourée par le circuit de signal. Si la source du champ électromagnétique est éloignée du circuit de signal, le couplage des champs électriques et magnétiques est considéré comme un couplage électromagnétique ou radiatif combiné.
Bruit à couplage conducteur
Le bruit à couplage conducteur existe parce que les conducteurs de câblage ont une impédance finie. L’effet de ces impédances de câblage doit être pris en compte lors de la conception d’un schéma de câblage. Le couplage conducteur peut être éliminé ou minimisé en rompant les boucles de masse (le cas échéant) et en fournissant des retours de masse séparés pour les signaux de faible niveau et de haut niveau à haute puissance. Un schéma de connexion à la masse en série aboutissant à un couplage conducteur est illustré en Figure 13a.
Si la résistance du fil de retour commun de A à B est de 0,1 Ω, la tension mesurée du capteur de température variera de 0,1 Ω * 1 A = 100 mV, selon si l’interrupteur est fermé ou ouvert. La mesure de la température aura 10° d’erreur. Le circuit de la Figure 13b fournit des retours de masse séparés. Ainsi, la sortie du capteur de température mesurée ne varie pas lorsque le courant dans le circuit de forte charge est activé et désactivé.
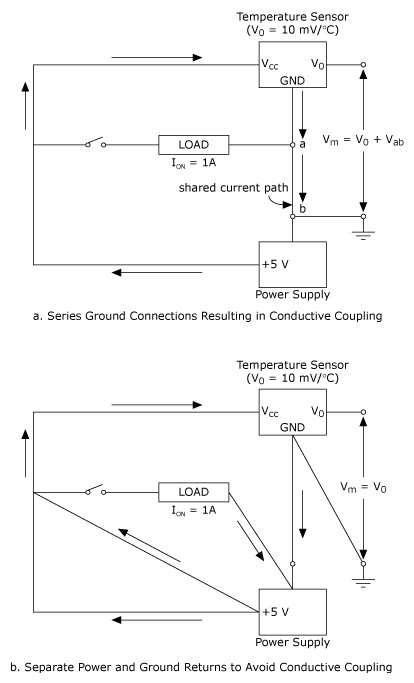
Figure 13. Bruit à couplage conducteur
Couplage capacitif et inductif
L’outil analytique requis pour décrire l’interaction des champs électriques et magnétiques des circuits de bruit et de signal est l’équation mathématique non triviale de Maxwell. Cependant, pour une compréhension intuitive et qualitative de ces voies de couplage, des équivalents de circuits groupés peuvent être utilisés. Les Figures 14 et 15 montrent l’équivalent du circuit groupé du couplage de champ électrique et magnétique.
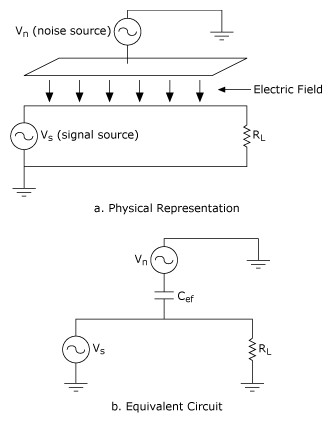
Figure 14. Couplage capacitif entre la source de bruit et le circuit de signal, modélisé par le condensateur Cef dans le circuit équivalent
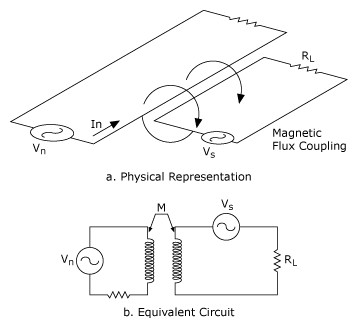
Figure 15. Couplage inductif entre la source de bruit et le circuit de signal, modélisé par l’inductance minimale M dans le circuit équivalent
L’introduction de modèles équivalents de circuits groupés dans le circuit équivalent de bruit gère une violation des deux hypothèses sous-jacentes de l’analyse des circuits électriques : c’est-à-dire que tous les champs électriques sont confinés à l’intérieur des condensateurs et tous les champs magnétiques sont confinés à l’intérieur des inducteurs.
Couplage capacitif
On peut voir maintenant l’utilité de l’équivalent de circuit groupé des voies de couplage. Un couplage de champ électrique est modélisé comme une capacité entre les deux circuits. La capacité équivalente Cef est directement proportionnelle à la zone de chevauchement et inversement proportionnelle à la distance entre les deux circuits. Ainsi, l’augmentation de la séparation ou la minimisation du chevauchement réduira Cef et donc le couplage capacitif du circuit de bruit au circuit de signal. D’autres caractéristiques du couplage capacitif peuvent également être dérivées du modèle. Par exemple, le niveau de couplage capacitif est directement proportionnel à la fréquence et à l’amplitude de la source de bruit et à l’impédance du circuit récepteur. Ainsi, le couplage capacitif peut être minimisé en réduisant la tension ou la fréquence de la source de bruit ou en réduisant l’impédance du circuit du signal. La capacité équivalente Cef peut également être réduite en utilisant un blindage capacitif. Le blindage capacitif fonctionne en contournant ou en fournissant un autre chemin pour le courant induit afin qu’il ne soit pas transporté dans le circuit du signal. Un blindage capacitif approprié nécessite une attention à la fois à l’emplacement du blindage et à la connexion du blindage. Le blindage doit être placé entre les conducteurs couplés de manière capacitive et connecté à la masse uniquement à l’extrémité source. Des courants de masse importants seront transportés dans le bouclier s’il est mis à la masse aux deux extrémités. Par exemple, une différence de potentiel de 1 V entre les masses peut forcer 2 A de courant de masse dans le blindage s’il a une résistance de 0,5 Ω. Des différences de potentiel de l’ordre de 1 V peuvent exister entre les masses. L’effet de ce courant de masse potentiellement important sera étudié plus en détail dans la discussion sur le bruit à couplage inductif. En règle générale, le métal ou le matériau conducteur à proximité du chemin du signal ne doit pas non plus être laissé flottant électriquement, car le bruit couplé de manière capacitive peut être augmenté.
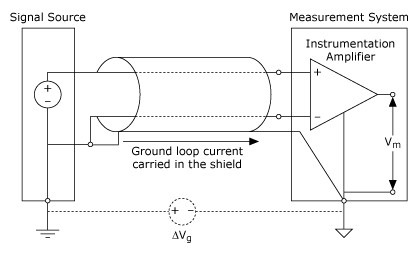
Figure 16. Mauvaise terminaison du blindage : les courants de masse sont transportés dans le blindage
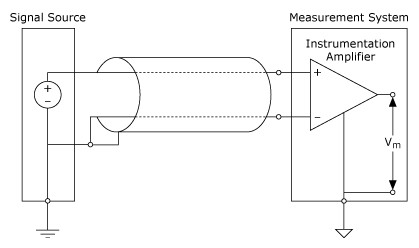
Figure 17. Terminaison du blindage appropriée : aucun courant de masse ou du signal ne traverse le blindage
Couplage inductif
Comme décrit plus haut, le couplage inductif résulte de champs magnétiques variant dans le temps dans la zone entourée par la boucle du circuit du signal. Ces champs magnétiques sont générés par des courants dans les circuits de bruit à proximité. La tension induite Vn dans le circuit du signal est donnée par la formule :
où f est la fréquence de la densité du flux variant de manière sinusoïdale, B est la valeur efficace de la densité du flux, A est l’aire de la boucle du circuit du signal et Æ est l’angle entre la densité du flux B et l’aire A.
Le modèle de circuit groupé équivalent au couplage inductif est l’inductance mutuelle M, comme indiqué sur la Figure 15(b). En matière d’inductance mutuelle M, Vn est donnée par la formule :
où In est la valeur efficace du courant sinusoïdal dans le circuit de bruit, et f est sa fréquence.
Étant donné que M est directement proportionnel à l’aire de la boucle du circuit récepteur et inversement proportionnel à la distance entre le circuit source de bruit et le circuit de signal, l’augmentation de la séparation ou la réduction de l’aire de la boucle du signal minimisera le couplage inductif entre les deux circuits. La réduction du courant In dans le circuit de bruit ou la réduction de sa fréquence peut également réduire le couplage inductif. La densité du flux B du circuit de bruit peut également être réduite en tordant les fils de la source du bruit. Enfin, un blindage magnétique peut être appliqué à la source du bruit ou au circuit de signal pour minimiser le couplage.
Le blindage contre les champs magnétiques à basse fréquence n’est pas aussi simple que le blindage contre les champs électriques. L’efficacité du blindage magnétique dépend du type de matériau : sa perméabilité, son épaisseur et les fréquences impliquées. En raison de sa perméabilité relative élevée, l’acier est beaucoup plus efficace que l’aluminium et le cuivre comme blindage pour les champs magnétiques basse fréquence (environ 100 kHz). À des fréquences plus élevées, cependant, l’aluminium et le cuivre peuvent également être utilisés. La perte d’absorption du cuivre et de l’acier pour deux épaisseurs est illustrée en Figure 18. Les propriétés de blindage magnétique de ces métaux sont assez inefficaces à basse fréquence, telles que celles de la ligne électrique (50 à 60 Hz), qui sont les principales sources de bruit basse fréquence couplées magnétiquement dans la plupart des environnements. De meilleurs blindages magnétiques tels que le Mumetal peuvent être trouvés pour le blindage magnétique basse fréquence, mais le Mumetal est très fragile et peut montrer une dégradation sévère de sa perméabilité, et donc, une dégradation de son efficacité en tant que blindage magnétique par des chocs mécaniques.
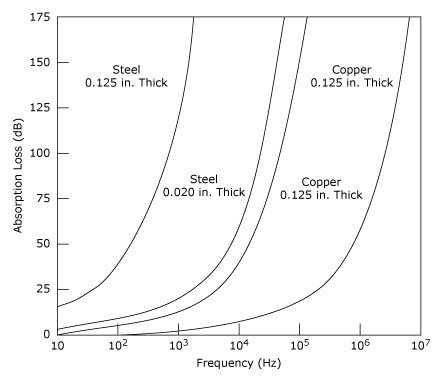
Figure 18. Perte d’absorption en fonction de la fréquence (d’après la Référence 1)
En raison du manque de contrôle sur les paramètres du circuit de bruit et de la difficulté relative de réaliser un blindage magnétique, la réduction de l’aire de la boucle du circuit de signal est un moyen efficace de minimiser le couplage inductif. Le câblage à paire torsadée est avantageux, car il réduit à la fois l’aire de la boucle dans le circuit de signal et annule les erreurs induites.
La formule (2) détermine l’effet du transport des courants de boucle de masse dans le blindage du circuit en Figure 16. Pour In = 2 A ; f = 60 Hz ; et M = 1 µH/ft pour un câble de 10 pieds (3 m) donne les résultats suivants :
Ce niveau de bruit se traduit par 3,1 LSB pour un système d’acquisition de données à 12 bits et 10 V. L’efficacité du système d’acquisition de données est ainsi réduite à peu près à celle d’un système d’acquisition 10 bits.
Lorsque vous utilisez un périphérique de la série E au moyen d’un câble blindé en mode différentiel, l’aire de la boucle du circuit de signal est minimisée, car chaque paire de fils de signal est configurée comme une paire torsadée. Cette situation n’est pas vraie pour le mode asymétrique avec le même périphérique et le même câble, car des aires de boucle de tailles différentes peuvent être formées avec des canaux différents.
Les sources de signaux de courant sont plus immunisées contre ce type de bruit que les sources de signaux de tension, car la tension induite magnétiquement apparaît en série avec la source, comme le montre la Figure 19. V21 et V22 sont des sources de bruit à couplage inductif et Vc est une source de bruit à couplage capacitif.
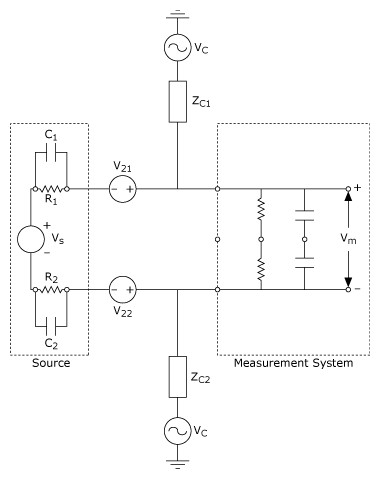
Figure 19. Modèle de circuit de couplage de tension de bruit inductif et capacitif
(H. W. Ott, Noise Reduction Techniques in Electronic Systems, Wiley, 1976.)
Le niveau de couplage inductif et capacitif dépend de l’amplitude du bruit et de la proximité de la source du bruit et du circuit de signal. Ainsi, l’augmentation de la séparation des circuits parasites et la réduction de l’amplitude de la source de bruit sont avantageuses. Le couplage conducteur résulte d’un contact direct ; ainsi, l’augmentation de la séparation physique du circuit de bruit n’est pas utile.
Couplage radiatif
Le couplage radiatif à partir de sources de rayonnement, comme les stations de radio et de télévision et les canaux de communication, ne serait normalement pas considéré comme une source d’interférence pour les systèmes de mesure de largeur de bande passante basse fréquence (moins de 100 kHz). Mais le bruit haute fréquence peut être rectifié et introduit dans les circuits basse fréquence grâce à un processus appelé rectification audio. Ce processus résulte des jonctions non linéaires dans les CI agissant comme des redresseurs. De simples filtres passe-bas passifs R-C à l’extrémité du récepteur d’un long câblage peuvent réduire la rectification audio.
Le terminal informatique omniprésent est une source d’interférence de champs électriques et magnétiques dans les circuits sensibles à proximité. Ceci est illustré en Figure 20, qui montre les graphiques des données obtenues à l’aide d’un périphérique d’acquisition de données en utilisant un gain de 500 avec l’amplificateur de gain programmable embarqué. Le signal d’entrée est un court-circuit au niveau du bloc de connexion. Un câble d’interconnexion non blindé de 0,5 m a été utilisé entre le bloc de connexion et le connecteur E/S du périphérique. Pour la connexion du signal différentiel, les entrées de voie haute et de voie basse étaient liées ensemble et à la masse du système analogique. Pour la connexion asymétrique, l’entrée de la voie était liée à la masse du système analogique.
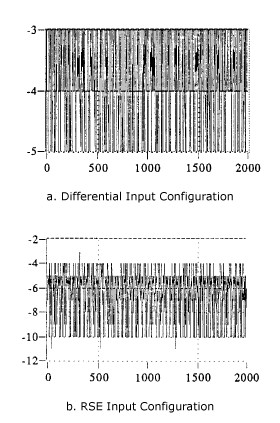
Figure 20. Immunité au bruit de la configuration d’entrée différentielle par rapport à celle de la configuration RSE (gain de la carte DAQ : 500 ; câble : 0,5 m non blindé ; source de bruit : moniteur d’ordinateur)
Sources de bruit diverses
Chaque fois que le mouvement du câble d’interconnexion est impliqué, comme dans un environnement vibratoire, une attention doit être portée à l’effet triboélectrique, ainsi qu’à la tension induite due au changement de flux magnétique dans la boucle du circuit de signal. L’effet triboélectrique est provoqué par la charge générée sur le diélectrique à l’intérieur du câble s’il ne maintient pas le contact avec les conducteurs du câble.
La modification du flux magnétique peut résulter d’un changement dans l’aire de la boucle du circuit de signal provoqué par le mouvement d’un ou des deux conducteurs : juste une autre manifestation du couplage inductif. Il suffit d’éviter de suspendre les fils et de bloquer le câblage.
Dans les circuits de mesure traitant des circuits de très bas niveau, il faut prêter attention à une autre source d’erreur de mesure : les thermocouples accidentels formés à travers les jonctions de métaux différents. Les erreurs dues aux effets de thermocouple ne constituent pas des erreurs de type interférence, mais méritent d’être mentionnées, car elles peuvent être la cause de décalages mystérieux entre les voies dans les mesures de signaux de bas niveau.
Systèmes équilibrés
En décrivant le système de mesure différentiel, il a été mentionné que le CMRR est optimisé dans un circuit équilibré. Un circuit équilibré est un circuit qui répond aux trois critères suivants :
- La source est équilibrée : les deux bornes de la source (signal haut et signal commun) ont une impédance égale à la masse.
- Le câble est équilibré : les deux conducteurs ont une impédance égale à la masse.
- Le récepteur est équilibré : les deux terminaux de l’extrémité de mesure ont une impédance égale à la masse.
Le capteur capacitif est minimisé dans un circuit équilibré, car la tension de bruit induite est la même sur les deux conducteurs en raison de leurs impédances égales à la masse et à la source de bruit.
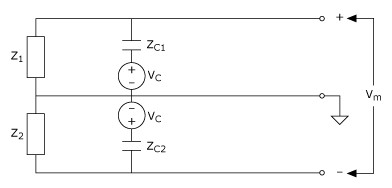
Figure 21. Modèle de circuit de couplage de bruit capacitif
(H.W. Ott, Noise Reduction Techniques in Electronic Systems, Wiley, 1976.)
Si le modèle de circuit de la Figure 21 représentait un système équilibré, les conditions suivantes s’appliqueraient :
Une analyse de circuit simple montre que, pour le cas équilibré V + = V -, la tension couplée de manière capacitive Vc apparaît comme un signal de mode commun. Pour le cas déséquilibré, c’est-à-dire Z1 <> Z2 ou Zc1 <> Zc2, la tension couplée de manière capacitive Vc apparaît comme une tension différentielle, c’est-à-dire V+ <> V-, qui ne peut pas être rejetée par un amplificateur d’instrumentation. Plus le déséquilibre dans le système ou l’inadéquation des impédances à la masse et la source de bruit de couplage capacitif sont élevés, plus la composante différentielle du bruit couplé de manière capacitive sera élevée.
Une connexion différentielle présente un récepteur équilibré du côté du périphérique d’acquisition de données du câblage, mais le circuit n’est pas équilibré si la source ou le câblage n’est pas équilibré. Ceci est illustré en Figure 22. Le périphérique d’acquisition de données est configuré pour le mode d’entrée différentiel au moyen d’un gain de 500. L’impédance source Rs était la même (1 kΩ) dans les deux configurations. Les résistances de polarisation utilisées dans le circuit de la Figure 22b sont toutes deux de 100 kΩ. Le rejet en mode commun est meilleur pour le circuit de la Figure 22b que pour la Figure 22a. Les Figures 22c et 22d sont des tracés du domaine temporel des données obtenues à partir des configurations 22a et 22b, respectivement. Veuillez noter l’absence de composants bruit-fréquence avec la configuration de source équilibrée. La source de bruit dans cette configuration était le moniteur de l’ordinateur. La configuration équilibrée charge également la source de signal avec
Cet effet de chargement ne doit pas être ignoré. La configuration asymétrique ne charge pas la source du signal.
Dans une configuration telle que celle de la Figure 22a, le déséquilibre dans le système (inadéquation de l’impédance à la masse des conducteurs haut et bas du signal) est proportionnel à l’impédance source Rs. Pour le cas limite Rs = 0 Ω, la configuration de la Figure 22a est également équilibrée, et donc moins sensible au bruit.
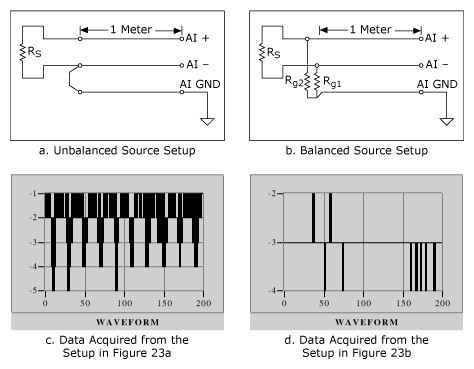
Figure 22. Configuration de la source et données acquises
Pour les paires torsadées ou blindées, les paires torsadées sont des exemples de câbles équilibrés. Le câble coaxial, en revanche, n’est pas équilibré, car les deux conducteurs ont une capacité à la masse différente.
Caractéristiques d’impédance de la source
Étant donné que l’impédance de la source est importante pour déterminer l’immunité au bruit capacitif du câblage de la source au système d’acquisition de données, les caractéristiques d’impédance de certains des transducteurs les plus courants sont répertoriées dans le Tableau 2.
Transducteur
| Caractéristiques d’impédance
|
Thermocouples
| Faible (<20 ohms)
|
Thermistances
| Élevée (> 1 kilohm)
|
Détecteur de température à résistance
| Faible (<1 kilohm)
|
Transducteur de pression statique
| Élevée (> 1 kilohm)
|
Jauges de contrainte
| Faible (<1 kilohm)
|
Électrode de mesure du pH en verre
| Très élevée (1 gigaohm)
|
Potentiomètre (déplacement linéaire)
| Élevée (de 500 ohms à 100 kilohms)
|
Les sorties de capteur d’impédance élevée et de bas niveau doivent être traitées par une étape de conditionnement de signal située à proximité du capteur.
Résolution des problèmes de bruit dans les configurations des mesures
La résolution des problèmes de bruit dans une configuration des mesures doit d’abord commencer par la localisation de la cause du problème d’interférence. Les problèmes de bruit peuvent provenir du transducteur ou du périphérique d’acquisition de données lui-même. Un processus d’essai et d’élimination pourrait être utilisé pour déterminer la raison.
Le périphérique d’acquisition de données même doit d’abord être vérifié en lui présentant une source de faible impédance sans câblage et en observant le niveau de bruit de mesure. Pour ce faire, il suffit de court-circuiter les signaux haut et bas à la masse d’entrée analogique avec un fil aussi court que possible, de préférence au niveau du connecteur E/S du périphérique d’acquisition de données. Les niveaux de bruit observés dans cet essai vous donneront une idée du meilleur scénario possible avec le périphérique d’acquisition de données précises. Si les niveaux de bruit mesurés ne sont pas réduits à partir de ceux observés dans la configuration complète (périphérique d’acquisition de données plus câblage plus sources de signal), le système de mesure lui-même est responsable du bruit observé dans les mesures. Si le bruit observé dans le périphérique d’acquisition de données ne correspond pas à ses spécifications, l’un des autres périphériques du système informatique peut être responsable.
Essayez de retirer d’autres cartes du système pour voir si les niveaux de bruit observés sont réduits. Changer l’emplacement de la carte, c’est-à-dire l’emplacement dans lequel la carte d’acquisition de données est branchée, est une autre solution de rechange.
L’emplacement des moniteurs d’ordinateur pourrait être suspect. Pour les mesures de signal de bas niveau, il est préférable de maintenir le moniteur aussi loin que possible du câblage du signal et de l’ordinateur. Il n’est pas souhaitable de placer le moniteur sur le dessus de l’ordinateur lors de l’acquisition ou de la génération de signaux de bas niveau.
Le câblage provenant du conditionnement du signal et de l’environnement dans lequel le câblage est acheminé vers le périphérique d’acquisition peut ensuite être vérifié s’il a été démontré que le périphérique d’acquisition n’est pas en cause. L’unité de conditionnement du signal ou la source du signal doit être remplacée par une source à faible impédance, et les niveaux de bruit dans les données numérisées doivent être observés. La source à faible impédance peut être un court-circuit direct des signaux haut et bas vers la masse d’entrée analogique. Cette fois, cependant, le court-circuit est situé à l’extrémité du câble. Si les niveaux de bruit observés sont à peu près les mêmes que ceux avec la source de signal réelle au lieu du court-circuit en place, le câblage et/ou l’environnement dans lequel le câblage est exécuté est en cause. La réorientation des câbles et l’éloignement des sources de bruit sont des solutions possibles. Si la source de bruit n’est pas connue, l’analyse spectrale du bruit peut indiquer les fréquences d’interférence, qui à leur tour peuvent aider à localiser la source de bruit. Cependant, si les niveaux de bruit observés sont inférieurs à ceux avec la source de signal réelle en place, une résistance approximativement égale à la résistance de sortie de la source doit être essayée à la place du court-circuit à l’extrémité du câble. Cette configuration montrera si le couplage capacitif dans le câble à cause d’une impédance de source élevée est le problème. Si les niveaux de bruit observés dans cette dernière configuration sont inférieurs à ceux du signal réel en place, le câblage et l’environnement peuvent être ignorés comme étant le problème. Dans ce cas, la source de signal ou une configuration incorrecte du périphérique d’acquisition de données pour le type de source est la cause du problème.
Techniques de traitement du signal pour la réduction du bruit
Bien que les techniques de traitement du signal ne remplacent pas une interconnexion correcte du système, elles peuvent également être utilisées pour la réduction du bruit. Toutes les techniques de traitement du signal réduisant le bruit reposent sur l’échange de la bande passante du signal pour améliorer le rapport signal/bruit. De façon générale, ceux-ci peuvent être classés comme des mesures de pré-acquisition ou de post-acquisition. Des exemples de techniques de pré-acquisition sont différents types de filtrage (passe-bas, passe-haut ou passe-bande) pour réduire le bruit hors bande dans le signal. La bande passante de mesure n’a pas besoin de dépasser la dynamique ou la plage de fréquences du transducteur. Les techniques de post-acquisition peuvent être décrites comme un filtrage numérique. La technique de filtrage post-acquisition la plus simple est le moyennage. Il en résulte un filtrage en peigne des données acquises et est particulièrement utile pour rejeter des fréquences d’interférence précises telles que 50 à 60 Hz. N’oubliez pas que le couplage inductif de sources basse fréquence telles que les lignes électriques de 50 Hz à 60 Hz est plus difficile à protéger. Pour un rejet d’interférence optimal par moyennage, l’intervalle de temps des données acquises utilisées pour le moyennage, Tacq, doit être un multiple entier de Trej = 1/Frej, où Frej est la fréquence rejetée de manière optimale.
où N cycles est le nombre de cycles de fréquence d’interférence en cours de moyennage. Comme Tacq = Ns ´ Ts où Ns est le nombre d’échantillons utilisés pour le moyennage et Ts est l’intervalle d’échantillonnage, l’équation (1) peut être écrite comme suit :
ou
L’équation (4) détermine la combinaison du nombre d’échantillons et de l’intervalle d’échantillonnage pour rejeter une fréquence d’interférence précise en faisant le moyennage. Par exemple, pour un rejet à 60 Hz avec N cycles = 3 et Ns = 40, nous pouvons calculer la fréquence d’échantillonnage optimale comme suit :
Ainsi, un moyennage de 40 échantillons acquis à un intervalle d’échantillonnage de 1,25 ms (ou 800 échantillons/s) rejettera le bruit à 60 Hz des données acquises. De même, une moyenne de 80 échantillons acquis à 800 échantillons/s (10 lectures/s) rejettera les fréquences 50 et 60 Hz. Lorsque vous utilisez une technique de filtrage numérique passe-bas, telle que le moyennage, vous ne pouvez pas supposer que les données résultantes n’ont pas d’erreurs CC telles que des décalages causés par des boucles de masse. En d’autres termes, si un problème de bruit dans un système de mesure est résolu par moyennage, le système peut toujours avoir des erreurs d’offset CC. Le système doit être vérifié si la précision absolue est essentielle pour les mesures.
Références
- Ott, Henry W., Noise Reduction Techniques in Electronic Systems. New York : John Wiley & Sons, 1976.
- Barnes, John R., Electronic System Design: Interference and Noise Control Techniques, New Jersey : Prentice-Hall, Inc., 1987.