Arquitecturas de sistemas de pruebas de hardware-in-the-loop (HIL)
Información general
Puede probar los sistemas de control embebido de manera más eficiente con el poderoso método de simulación de hardware-in-the-loop (HIL). Las consideraciones de seguridad, disponibilidad o costo pueden hacer que no sea práctico realizar todas las pruebas necesarias con el sistema de control embebido completo. Con la simulación HIL, usted puede simular las partes del sistema que plantean estos desafíos. Al probar minuciosamente el dispositivo de control embebido en un entorno virtual antes de proceder a las pruebas del mundo real del sistema completo, puede mantener los requisitos de fiabilidad y tiempo de comercialización de manera rentable incluso cuando los sistemas que está probando se vuelven más complejos. .
Contenido
- Componentes de un sistema de pruebas HIL
- Inserción de fallas de hardware
- Probar sistemas de múltiples ECU
- Potencia de procesamiento adicional - procesamiento distribuido
- Cableado simplificado - E/S distribuida
- Implementar sistemas de pruebas HIL
- Próximos pasos
Componentes de un sistema de pruebas HIL
Un sistema de pruebas HIL consta de tres componentes principales: un procesador en tiempo real, interfaces de E/S y una interfaz de operador. El procesador en tiempo real es el núcleo del sistema de pruebas HIL. Proporciona ejecución determinística de la mayoría de los componentes del sistema de pruebas HIL como comunicación de E/S de hardware, generación de estímulos y ejecución de modelos. Un sistema en tiempo real generalmente es necesario para proporcionar una simulación precisa de las partes del sistema que no están presentes físicamente como parte de la prueba. Las interfaces de E/S son señales analógicas, digitales y de bus que interactúan con la unidad bajo prueba. Usted puede usarlas para producir señales de estímulos, adquirir datos para registro y análisis y proporcionar las interacciones de sensor/actuador entre la unidad de control electrónico (ECU) probada y el entorno virtual simulado por el modelo. La interfaz del operador se comunica con el procesador en tiempo real para proporcionar comandos de pruebas y visualización. A menudo, este componente también permite la administración de la configuración, automatización de la prueba, análisis y tareas de reportes.
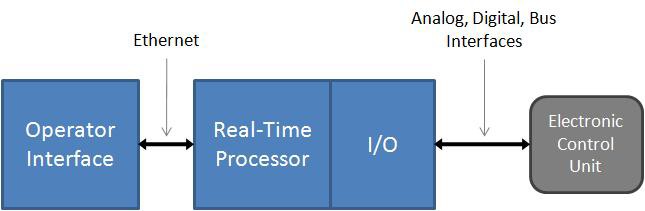
Figura 1. Un sistema de pruebas HIL consta de tres componentes principales: una interfaz de operador, un procesador en tiempo real e interfaces de E/S.
Inserción de fallas de hardware
Muchos sistemas de pruebas HIL usan inserción de fallas de hardware para crear fallas de señales entre la ECU y el resto del sistema para probar, caracterizar o validar el comportamiento del dispositivo bajo estas condiciones. Para lograr esto, usted puede insertar unidades de inserción de fallas (FIU) entre las interfaces de E/S y la ECU para permitir al sistema de pruebas HIL conectar las señales de la interfaz entre una operación normal y condiciones de falla como un corto a tierra o circuito abierto.
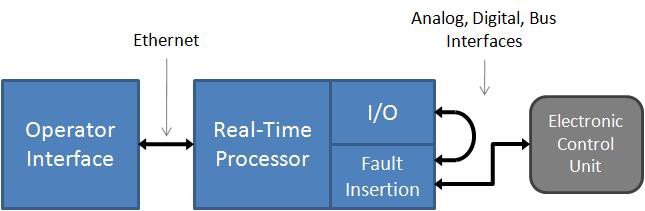
Figura 2. Puede usar inserción de fallas de hardware para probar el comportamiento de la ECU durante las fallas de la señal.
Probar sistemas de múltiples ECU
Algunos sistemas de control embebido, como un automóvil, avión o parque eólico, usan múltiples ECUs que a menudo están conectados en red para funcionar sin dificultad. Aunque cada una de estas ECU debe ser probada con anticipación de forma independiente, a menudo se utiliza una integración del sistema de pruebas HIL como un simulador completo de vehículo o simulador aéreo, para lograr pruebas virtuales más completas.
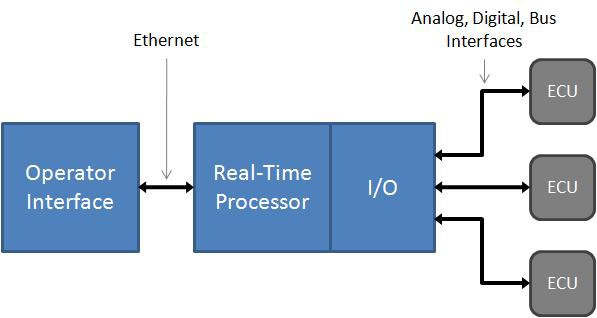
Figura 3. Los automóviles, aviones y parques eólicos utilizan múltiples ECUs.
Al probar un sistema de control de múltiples ECU (y aún algunos sistemas de control de una sola ECU), surgen dos necesidades: potencia de procesamiento adicional y cableado simplificado.
Potencia de procesamiento adicional - procesamiento distribuido
Aún con la potencia de procesamiento multinúcleo más reciente, algunos sistemas requieren más potencia de procesamiento de la que hay disponible en un solo chasis. Para solucionar este reto, usted puede usar técnicas de procesamiento distribuido para cumplir con los requisitos de rendimiento de estos sistemas. En sistemas de gran cantidad de canales, la necesidad es más que simplemente potencia de procesamiento adicional, también es necesaria E/S adicional. Por el contrario, los sistemas que utilizan grandes modelos de procesadores, a menudo usan chasis adicionales únicamente para potencia de procesamiento extra, lo que permite a esos procesadores permanecer dedicados a una sola tarea para mayor eficiencia. Dependiendo de cómo están distribuidas las tareas del simulador, puede ser necesario proporcionar señales de disparo y temporización compartidas entre el chasis, así como reflejar datos determinísticos para permitirles operar sin dificultad.
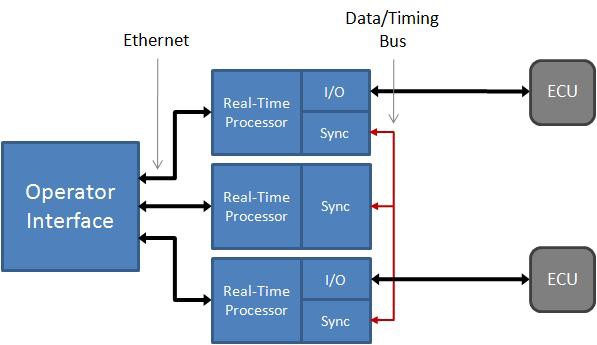
Figura 4. Al usar múltiples chasis para potencia de procesamiento adicional, a menudo es necesario proporcionar interfaces de temporización y sincronización de datos entre ellos.
Cableado simplificado - E/S distribuida
Implementar y mantener el cableado para sistemas de gran cantidad de canales puede representar retos costosos y consumir tiempo. Estos sistemas pueden requerir que cientos a miles de señales sean conectadas entre la ECU y el sistema de pruebas HIL, abarcando muchos metros que contribuyen a los requisitos de espacio.
Afortunadamente, las tecnologías de E/S distribuida determinística le pueden ayudar a disminuir estas complejidades de cableado y proporcionar conectividad modular a los ECUs, lo cual permite modificaciones eficientes de configuración del sistema. En lugar de enrutar todas las conexiones de regreso a un solo rack que contiene uno o más chasis de procesamiento en tiempo real con interfaces de E/S; puede usar E/S distribuida determinística para proporcionar interfaces de E/S modular ubicadas cerca de cada ECU, sin sacrificar el determinismo de alta velocidad necesario para una simulación precisa de las partes virtuales del sistema.
Este enfoque reduce enormemente el costo y la complejidad del cableado del sistema de pruebas HIL, haciendo posible que las conexiones entre la ECU y las interfaces de E/S se puedan hacer localmente (abarcando menos de un metro) , mientras que un solo cable de bus es usado para abarcar la distancia adicional al chasis de procesamiento en tiempo real. Además, con la naturaleza modular de este enfoque, los sistemas de pruebas HIL se pueden escalar, progresivamente, de un sistema de pruebas de múltiples ECU en el cual todos menos una de las ECUs están simuladas a un sistema de pruebas HIL de integración completa de sistemas donde ninguna de las ECUs es simulada.
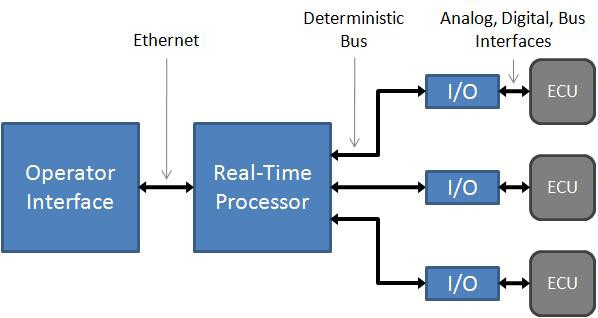
Figura 5. Las interfaces de E/S distribuida determinística reducen enormemente los costos y la complejidad del cableado del sistema de pruebas HIL porque las conexiones de la ECU a las interfaces de E/S se pueden hacer de forma local.
Implementar sistemas de pruebas HIL
Una vez que ha seleccionado la arquitectura apropiada para su sistema de pruebas HIL, el primer paso para crear un sistema de pruebas HIL es seleccionar los componentes que mejor cumplen con sus requisitos de desarrollo. NI ofrece una amplia variedad de opciones de procesamiento en tiempo real y E/S para implementar sistemas de pruebas HIL. Ya que están basadas en estándares abiertos de la industria, puede estar seguro que siempre proporcionarán los últimos avances de la tecnología de PC a su sistema de pruebas HIL y siempre cumplirán con los futuros requisitos del sistema de pruebas.
La plataforma HIL de NI es abierta y extensible, lo cual significa que puede adaptarse para cambiar los requisitos del sistema. Debido a su arquitectura modular, la plataforma HIL de NI se puede actualizar fácilmente con funcionalidad adicional, lo cual le ayuda a preparar sus sistemas de pruebas y cumplir con los requisitos de las aplicaciones embebidas de pruebas de software más demandantes. Además de la más amplia variedad de E/S en el mercado, NI ofrece herramientas de software que permiten automatizar sus pruebas HIL, realizar procesamiento posterior y generación de reportes y asignar resultados de pruebas a los requisitos. Estas herramientas le ayudan a realizar una variedad más amplia de pruebas al inicio del proceso de desarrollo de software, lo cual reduce el costo de desarrollo y mejora la calidad del producto.
Próximos pasos
- Lea el caso de estudio TATA Motors construye un sistema de pruebas HIL para simulación de vehículos híbridos usando las herramientas de NI
- Descargue nuestro kit de recursos de HIL
- Aprenda más sobre las herramientas HIL de NI para el transporte
- Aprenda más sobre las herramientas HIL de NI para aeroespacial y defensa