Virtualización de ECU: El viaje
Información general
Para replicar hábilmente el comportamiento de la unidad de control electrónico (ECU), necesita una herramienta poderosa para el desarrollo y las pruebas automotrices. Una metodología recomendada para virtualizar ECUs en vehículos se basa en un proceso sistemático, que enfatiza los beneficios de las pruebas tempranas a través del cumplimiento de las cuatro capas de la arquitectura clásica de arquitectura de sistema abierto AUTomotive (AUTOSAR), que abarca desde la aplicación hasta la abstracción del microcontrolador. Esta nota técnica describe los pasos cruciales, incluyendo el modelado de aplicaciones y la simulación de ECU virtual (vECU) utilizando NI VeriStand y el software Silver de Synopsys.
Contenido
- Áreas críticas de enfoque para la virtualización de ECUs en vehículos
- Logre una simulación de ECU de vehículo en tiempo real
- Próximos pasos
- Referencias
Áreas críticas de enfoque para la virtualización de ECUs en vehículos
La mayoría de las ECUs se adhieren a una arquitectura bien definida (ver Figura 1) y establecida por AUTOSAR, que es una arquitectura de software estandarizada y desarrollada en colaboración por fabricantes de automóviles, proveedores y otras partes interesadas. Proporciona una plataforma común para el desarrollo, la integración y la administración de software en vehículos modernos. AUTOSAR tiene como objetivo abordar la creciente complejidad de los sistemas electrónicos automotrices definiendo un framework estandarizado para la arquitectura de software, las interfaces de aplicación y los protocolos de comunicación.
Este enfoque abierto y estandarizado permite que diferentes componentes de software automotriz de varios proveedores funcionen perfectamente juntos, fomentando la interoperabilidad y la escalabilidad. AUTOSAR promueve la reutilización de los módulos de software, lo que facilita a las compañías automotrices desarrollar y mantener software en diferentes modelos de vehículos y unidades de control electrónico. Esto da como resultado procesos de desarrollo más eficientes, un menor tiempo de comercialización y una mayor fiabilidad general del sistema en la industria automotriz.
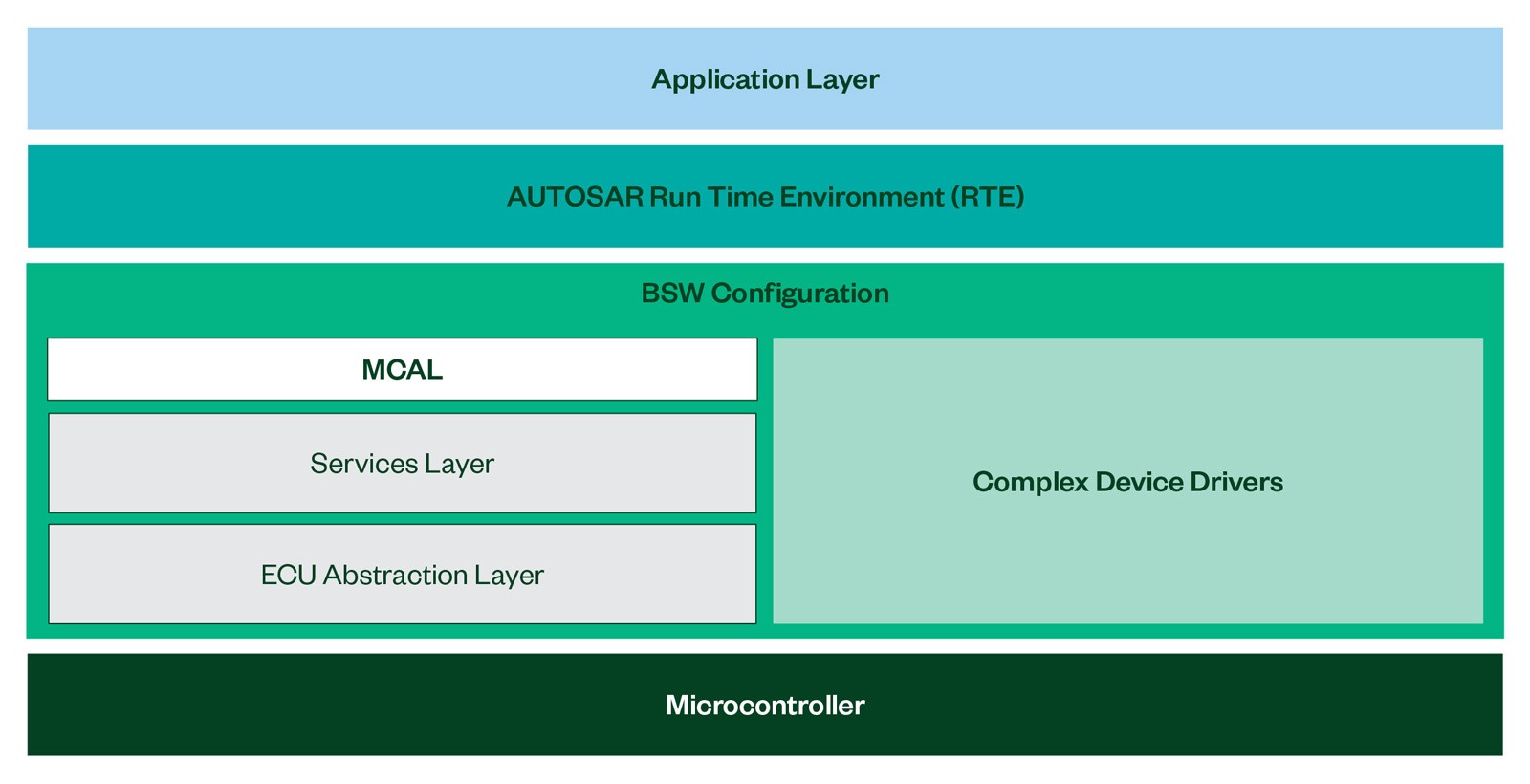
Figura 1: Arquitectura en capas de AUTOSAR ECU
Como se muestra en la Figura 1, la arquitectura AUTOSAR consta de cuatro capas que dotan a una ECU de capacidades. Aprovechar esta arquitectura en la simulación de ECU facilita la validación temprana de las características, eliminando la necesidad de esperar a la ECU física, acelerando así el proceso de pruebas.
Para comprender mejor el propósito detrás de cada capa, profundicemos en las tareas finales de cada una de las cuatro capas de la arquitectura de la plataforma AUTOSAR Classic.
- Capa de aplicación:
- Implementa código de aplicación de nivel superior.
- Organiza los componentes de software (SWC) para características distintivas según sea necesario.
- Implementa interfaces estandarizadas asociadas con SWCs para desarrollar aplicaciones automotrices.
- Facilita la comunicación entre componentes a través de puertos bien definidos, lo que permite la interacción con la capa del software básico AUTOSAR.
- Activa la ejecución cíclica o basada en eventos de la implementación real dentro de los SWCs, involucrando entidades ejecutables como la recepción de datos.
- Capa de entorno de ejecución:
- Actúa como la capa de middleware.
- Proporciona servicios de comunicación para SWCs AUTOSAR y aplicaciones con partes de sensor/actuador AUTOSAR.
- Hace que los SWCs sean independientes de las asignaciones específicas de ECU.
- Cuenta con especialización para cada ECU y aplicación.
- Garantiza la autonomía de los componentes del software AUTOSAR, fomentando la flexibilidad y la portabilidad.
- Capa de configuración de software básico (BSW):
- Capa de abstracción de ECU:
- Interfaces con Capa de Abstracción de Microcontrolador (MCAL) para acceso periférico.
- Establece una API para la interacción de la unidad de microcontrolador (MCU), lo que garantiza la independencia del hardware de la ECU.
- Logra independencia de montaje de MCU y confía en el hardware de la ECU.
- Controladores complejos:
- Maneja funciones complejas (por ejemplo, control de inyección).
- Accede directamente a la MCU para cumplir con requisitos especiales de temporización.
- Monta una interfaz estandarizada según AUTOSAR.
- Capa de abstracción del microcontrolador:
- Accede directamente a periféricos MCU en chip y dispositivos externos.
- Garantiza la independencia del software superior de las especificaciones de MCU.
- Establece una interfaz que no se ve afectada por las especificaciones estandarizadas de MCU.
- Capa de abstracción de ECU:
- Capa de microcontrolador:
- Sirve como interfaz que permite la comunicación entre las capas de software y los periféricos de hardware del microcontrolador.
En una exploración más detallada de estas capas, se hace evidente que la capa de aplicación juega un papel fundamental al encapsular la funcionalidad principal de la ECU. Aprovechando el código dentro de esta capa, podemos simular con precisión nuestra vECU.
Logre una simulación de ECU de vehículo en tiempo real
Para lograr una simulación precisa de una vECU, es esencial un enfoque estructurado (ver Figura 2). Por lo tanto, siguiendo los siguientes pasos clave, podemos lograr nuestro objetivo.
- Modelado de aplicaciones: Comience por crear un modelo integral que represente fielmente las capacidades de la ECU utilizando el software MathWorks® MATLAB y el software Simulink.
- Creación de aplicaciones: Establecer un mapeo meticuloso de las diversas señales de E/S presentes en la ECU a los componentes de AUTOSAR. Este mapeo se puede lograr a través de herramientas como el software MATLAB , el software Simulink o ISOLAR-A*.
- Configuración básica del software: Replicar los componentes de software básicos esenciales que rigen el funcionamiento de la ECU. Esta tarea se puede lograr con la ayuda de ISOLAR-B*.
- Construcción de ECU virtual: Inicie el proceso de virtualización de la ECU utilizando un archivo de configuración con el software Synopsys, conocido como Silver.
- Simulación de ECU virtual: Utilice el software NI VeriStand , combinado con la plataforma de pruebas en tiempo real NI HIL, que crea una simulación efectiva dada la reconfigurabilidad de sus puertos de E/S de acuerdo con el tipo de señal deseada. Esta capacidad nos permite simular la vECU de acuerdo con las especificaciones precisas del cliente. La transición perfecta entre varias vECUs se logra con solo hacer clic en un botón, lo que permite a los usuarios saltar entre las ECUs simuladas.
* ISOLAR-A e ISOLAR-B se refieren a herramientas de software de ETAS para desarrollar software embebido en ECUs automotrices. Ayudan a crear software compatible con AUTOSAR, estandarizando arquitecturas para mejorar la escalabilidad y la interoperabilidad. Para obtener los últimos detalles, consulte la documentación oficial de ETAS o contáctelos directamente.
La siguiente representación visual resume el proceso recomendado para la virtualización de ECU. Para guiarlo en cada paso, hemos resaltado en negrita las herramientas recomendadas por NI. Además, cada paso enumera otras herramientas ampliamente utilizadas que se pueden considerar para los respectivos procesos. Este enfoque estructurado tiene como objetivo mejorar la claridad y ayudar a tomar decisiones informadas al implementar la virtualización de ECU.
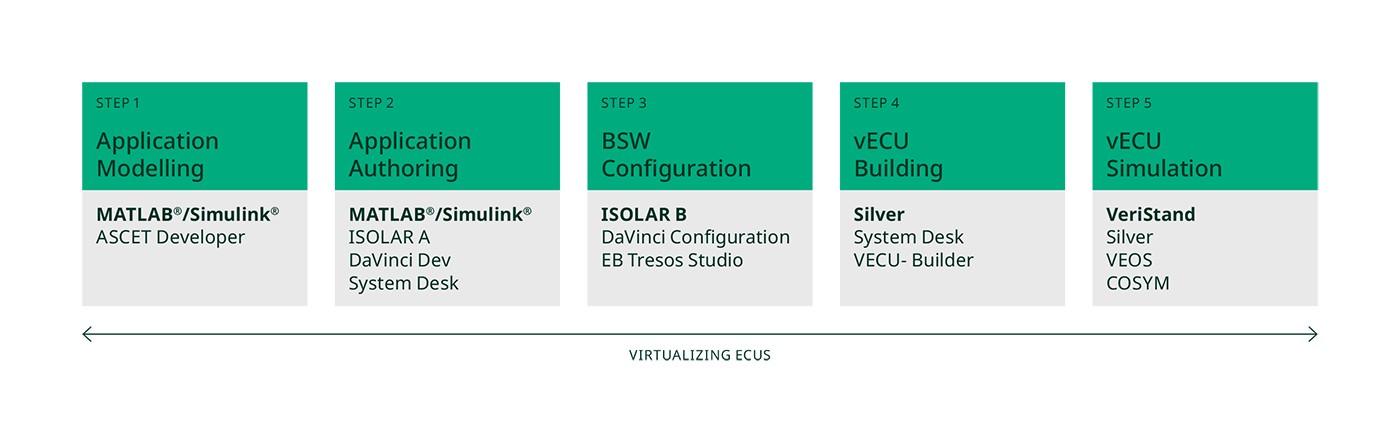
Figura 2: Proceso de validación virtual
Por lo tanto, siguiendo estos pasos bien definidos, podemos simular de manera efectiva y eficiente el comportamiento de la ECU de cualquier vehículo, ofreciendo una herramienta poderosa para el desarrollo y las pruebas automotrices, ahorrando tiempo y cambiando a la izquierda en el proceso de pruebas.