Generación de prototipos y pruebas de lidar FMCW
Información general
La generación de prototipos y pruebas de lidar de onda continua modulada en frecuencia (FMCW) presenta muchos desafíos. Analicémoslos, dividiéndolos en partes manejables y procesables, y aprendamos una guía práctica sobre cómo superarlos, uno por uno, hasta la prueba a nivel del sistema.
Introducción
Cuando se trata de autonomía, la pregunta es cuándo y cómo. Si bien la industria generalmente considera al lidar como una tecnología habilitadora que acelera la autonomía, enfrenta obstáculos importantes para volverse viable en la producción en masa. Los nuevos diseños de lidar ofrecen tecnología de imágenes de bajo costo, bajo consumo de energía y fácil de fabricar; sin embargo, no están probados y no están disponibles comercialmente. Pero hay esperanza. El lidar FMCW brinda a los fabricantes de automóviles una modalidad de sensor viable. Pero es nuevo y trae consigo desafíos desconocidos de desarrollo y validación. Veamos cómo las industrias adyacentes han utilizado las lecciones aprendidas para disminuir las preocupaciones sobre el desarrollo de lidar.
El mercado de los semiconductores ha descubierto maneras de fabricar fuentes de láser moduladas y cadenas de recepción a un gran volumen y a un costo relativamente bajo. La industria aeroespacial y de defensa ha creado prototipos de sistemas de alto ancho de banda y gran cantidad de canales con requisitos que varían constantemente. Y el sector automotriz ha preparado el escenario para las pruebas lidar FMCW, lanzando la prueba de radar FMCW para sus líneas de vehículos existentes.
Analicemos cómo puede implementar las estrategias de otras industrias y prácticas recomendadas para aprovechar esta nueva tecnología.
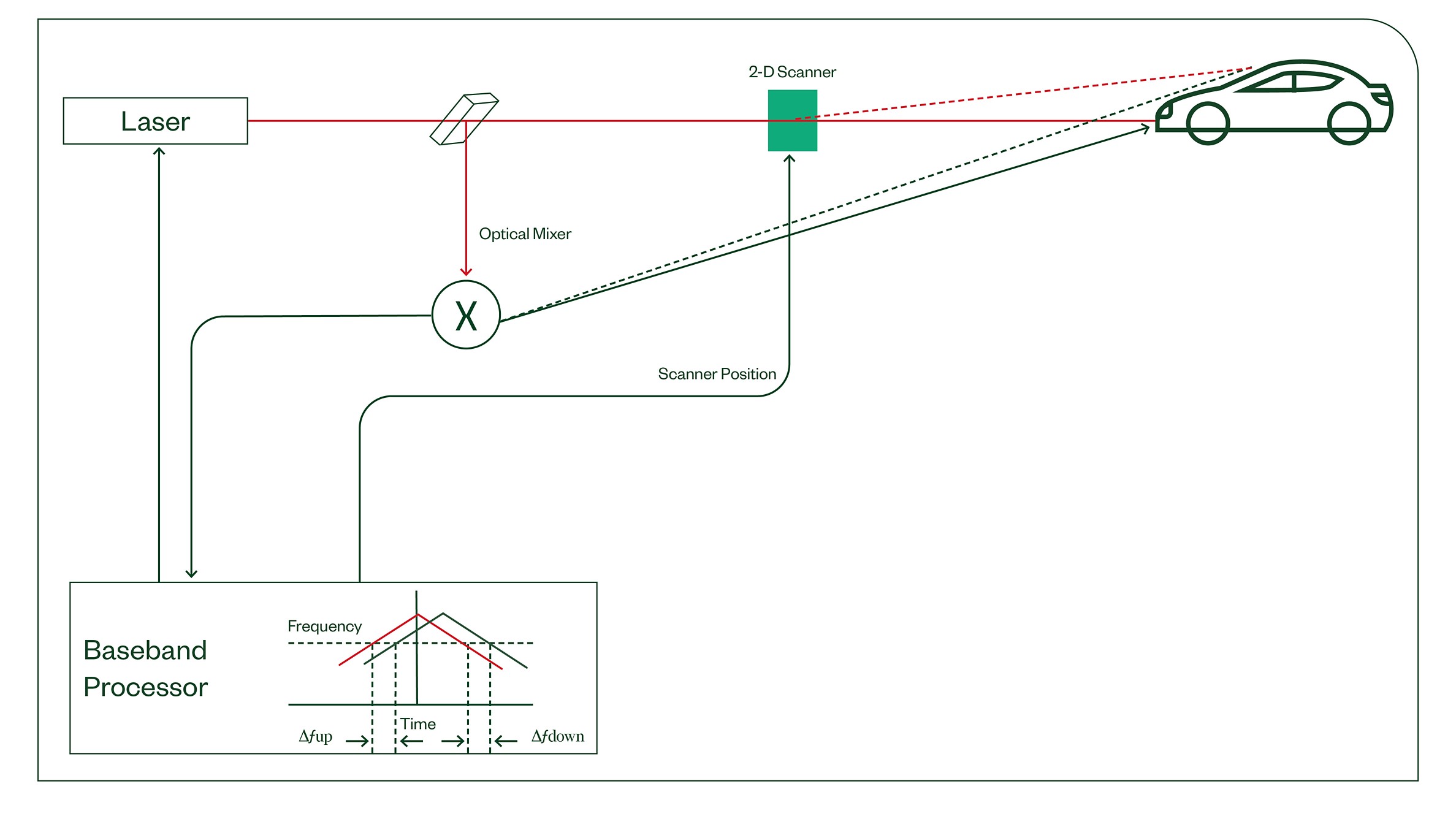
Figura 1. Arquitectura de lidar FMCW
Generar prototipos de lidar FMCW
Lidar FMCW es un sistema extremadamente complicado de armar: Requiere varias fuentes de láser moduladas y perfectamente sincronizadas, y al menos tantos convertidores A/D, para impulsar cantidades masivas de datos a través de algoritmos complejos, todo para darle al sistema autónomo una visión del mundo en 3D construida en pequeños puntos codificados por colores con indicaciones de velocidad. . Olvídese de probar lidar por un momento, ¿cómo construyen los desarrolladores?
Una forma implica dividir el sistema FMCW en un subsistema de dominio eléctrico y un subsistema de dominio óptico para generar prototipos.
Generar prototipos del subsistema de dominio eléctrico
El subsistema de dominio eléctrico consta de un chirrido FMCW generado en el lado de transmisión y un convertidor de analógico a digital de alto ancho de banda en el lado de recepción. La más compleja de las dos, es la cadena de recepción, ya que la onda FMCW recibida debe separarse y compararse con la señal de referencia y solo entonces puede producir la nube de puntos resultante.
A menudo, el lado de transmisión utiliza un generador de formas de onda arbitrarias, multicanal y perfectamente sincronizado con requisitos de canal de hasta y excediendo los 32 canales (con prototipos completos del sistema de transmisión). Es posible que solo necesite generar la señal de chirp en sí (que por lo general es inferior a 100 MHz), o puede que necesite generar la forma de onda modulada (que puede exceder los 3 GHz). En la cadena de recepción, los digitalizadores de alto ancho de banda, multicanal y perfectamente sincronizados se conectan directamente a los FPGAs, donde usted puede generar prototipos de procesamiento de señal de manera rápida y repetida. Muchas veces, estos FPGA, que tienen muchos procesadores de señales digitales y transformadas rápidas de Fourier integradas, necesitan comunicarse entre sí para comprender la temporización y la posición relativa. Solo entonces pueden enviar los resultados a una PC principal para generar la nube de puntos 4D.
Debido a que estos sistemas de generación de prototipos pueden volverse extremadamente molestos, un adecuado socio de tecnología puede ahorrarle tiempo y dinero integrando todos estos requisitos en una única plataforma modular de lidar FMCW.

Figura 2. Los Transceptores IF PXI FlexRIO combinan convertidores de datos de alta velocidad con FPGAs Xilinx para aplicaciones como pruebas de lidar que demandan procesamiento de señales en tiempo real y entrada analógica de alto rendimiento.
Generar prototipos del subsistema de dominio óptico
El dominio óptico requiere varios instrumentos adicionales, que dependen en gran medida del tipo de fuente de láser, fotodetector y metodología de escaneo (imágenes) que utilice el fabricante de lidar.
Casi todos los prototipos ópticos lidar FMCW utilizan una fuente de láser coherente, así como un medio para convertir el dominio eléctrico en el dominio óptico y mezclarlo con la óptica. Muchas veces, un convertidor eléctrico a óptico (E2O) convierte el chirrido eléctrico en un chirrido óptico, y un convertidor óptico a eléctrico (O2E) convierte de vuelta a la cadena de recepción eléctrica. Esto puede requerir la combinación óptica de una fuente de láser de onda continua en un chirrido generado eléctricamente.
Una ventaja de PXI es que puede usarlo para la generación de prototipos ópticos y sistemas de pruebas que complementan los sistemas eléctricos que acabamos de mencionar. Por ejemplo, Coherent Solutions fabrica módulos PXI ópticos que puede combinar con el equipo de dominio eléctrico (por lo general en el mismo sistema sincronizado) para crear una plataforma completa de generación de prototipos.

Figura 3. Sistema PXI optoeléctrico
Además, deberá cumplir con los requisitos de alimentación, medidas y control analógicos y digitales, y transferencia de datos para completar su prototipo de lidar FMCW. Compañías como NI, que ofrecen instrumentos modulares en un formato pequeño, pueden administrar estos componentes en un solo sistema.
Metodologías de validación de componentes a nivel de chip
En la fase de desarrollo, debe seguir varios procedimientos de verificación y validación para asegurarse de que el lidar FMCW cumple sus promesas. Es más fácil dividir los requisitos de la prueba de lidar en pruebas a nivel de chip, módulo y sistema.
Al igual que con el sistema de generación de prototipos, al principio querrá probar por separado los dominios eléctrico y óptico. Debe validar los chips y los circuitos integrados específicos de la aplicación para cada uno de los componentes. Esta es una lista de metodologías de validación de componentes a nivel de chip:
Dominio eléctrico
Transmisión y recepción (controlador IC, CDR, TIA)
- Parámetros S de 2 o 4 puertos con un VNA
- AWG >1 GS/s para controlar los componentes eléctricamente
- Osciloscopio >3 GS/s para analizar resultados
- Medidores de potencia
- Osciloscopio de muestreo y BERT para componentes digitales y desarrollar diagramas de ojos
- TDR para parámetros S más rápidos y de menor costo
- Fuentes de alimentación
Dominio óptico
Transmisión (láser, modulador, escáner)
- O2E y analizador vectorial de señales para ruido de intensidad relativa
- OSA para relación de supresión de modo lateral
- Osciloscopio óptico, espectrómetro y fuente de láser para linealidad del chirp (existen otras técnicas para esto)
- Unidad de medida y fuente de energía de barrido láser
- Atenuadores e interruptores ópticos variables para medidas y enrutado de señales
Recepción (fotodetector)
- Fuente de láser óptico coherente
- E2O y AWG o generador vectorial de señales
- Mezcladores ópticos
Un desafío importante al probar chips ópticos es alinear la óptica con el equipo de medidas. Varias compañías se especializan en esta capacidad, incluyendo PI-USA, con su tecnología de alineación óptica.
Figura 4. Alineación óptica paralela de PI USA (Imagen cortesía de PI USA)
Pruebas de lidar FMCW a nivel de módulo
Cuando reúne los chips en un módulo, puede agregar varias pruebas a nivel de componente. Si bien todas nuestras pruebas analizadas anteriormente son válidas para pruebas a nivel de módulo, no se dividen en indicadores clave de rendimiento (KPI) de componentes individuales; más bien, contienen los KPIs de todo el módulo.
Si está trasladando las pruebas a nivel de dispositivo y módulo del banco a la producción, es mejor reutilizar el hardware de validación y el software de pruebas Muchos de los procesos de prueba que discutimos se utilizan en un entorno de producción, ya sea a nivel de oblea o de módulo de producción en un montaje en sitio y al exterior o con un fabricante. Y debido a que optimizar el costo de la prueba de unidad se traduce en minimizar el costo del probador, el tiempo de prueba y el espacio, una vez más se beneficiará al colaborar con una compañía como NI que puede reempaquetar equipos de prueba de banco en un probador de producción y utilizar PXI para optimizar el tiempo de la prueba.
Figura 5. Plataforma común desde la caracterización hasta la producción
Pruebas de lidar FMCW a nivel del sistema
En este punto, todo el hardware y software de lidar se unen para recibir pruebas a nivel del sistema. La prueba ideal a nivel del sistema colocaría un lidar FMCW completo en una cámara pequeña y simularía ópticamente un entorno de largo alcance del mundo real que engaña al lidar para que construya una nube de puntos que emula ese entorno del mundo real. Al momento de escribir este artículo, no existe una metodología de emulación de nube de puntos FMCW completa disponible comercialmente y de bajo costo.
Sin embargo, podemos simular objetos y dispositivos ópticamente, lo que es extremadamente beneficioso para validar la óptica y los algoritmos y realizar la calibración, y durante la prueba de producción. Los partners de NI como Konrad Technologies, Dvin Technologies y Averna ofrecen emulación de objetos lidar y soluciones de simulación ambiental.
También podemos inyectar señales digitalmente detrás de la óptica para hacer que el sistema lidar crea que está viendo una nube de puntos completa.
Debido a que no existe una validación ideal a nivel del sistema, la mayoría de los ingenieros confían en las pruebas en campo. Colocan objetos conocidos y sus características en el interior o en el exterior para que el sistema lidar los represente. Luego, validan el rendimiento de lidar contra la verdad-terreno y aprueban/desaprueban el sistema. Si bien, actualmente muchas compañías utilizan esto para pruebas de producción de fin de línea del sistema lidar, es difícil de escalar.
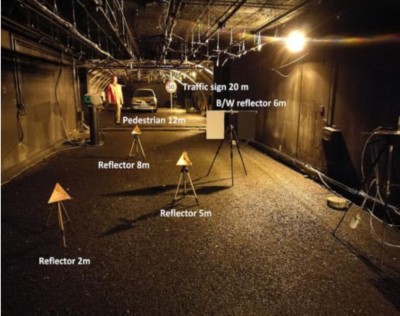
Figura 6. Rango de prueba de campo lidar 1
Conclusión
La tecnología de lidar está en constante evolución. Queda mucho trabajo por hacer para que los automóviles de manejo autónomo sean una realidad, y FMCW lidar es uno de los principales contribuyentes. Pero según los desafíos que hemos visto aquí, está claro que las compañías con experiencia en diferentes áreas deben colaborar para hacer de lidar una realidad comercialmente viable. Trabajemos juntos para conectar esos desafíos con soluciones que proporcionen resultados. Nuestro equipo NI ADAS/Autonomy está listo para conocerle, así que contáctenos y comencemos a trabajar.
Pasos siguientes
Un partner de NI es una entidad comercial independiente de NI, sin relación de representación, asociación ni participación con NI.