Medir torsión con sensores basados en puente
Este documento proporciona información para ayudarlo a comprender los fundamentos de las medidas de torsión y cómo las diferentes especificaciones de los sensores afectan el rendimiento del sensor de torsión en su aplicación. Después de decidirse por los sensores, puede considerar el hardware y el software necesarios para acondicionar, adquirir y visualizar correctamente las medidas de torsión. También puede considerar cualquier acondicionamiento de señales adicional que pueda necesitar.
¿Qué es torsión?

Fuerza es la medida de la interacción entre los cuerpos: para cada acción hay una reacción igual y opuesta. La fuerza también se describe como empujar o tirar de un objeto. Es una cantidad vectorial con magnitud y dirección.
Torsión es la tendencia de una fuerza a rotar un objeto alrededor de un eje. Similar a la fuerza que se describe como empujar o tirar, la torsión se puede describir como un giro a un objeto. La unidad de medida para torsión reconocida por el SI es Newton-metro (Nm). Usando una definición simple, la torsión es equivalente a la fuerza por la distancia, donde una torsión o giro en el sentido de las agujas del reloj suele ser positivo y una torsión en el sentido contrario a las agujas del reloj suele ser negativo. Los sensores de torsión se componen de galgas extensiométricas que se fijan a una barra de torsión. A medida que la barra gira, las galgas responden al esfuerzo de la barra, que es proporcional a la torsión.
Medir la torsión
Hay dos maneras comunes de medir la torsión: sensores de torsión de reacción y sensores de torsión rotativos; la principal diferencia es si puede rotar con el dispositivo bajo prueba.
Sensores de torsión de reacción
Torsión de reacción es la fuerza de giro, o el momento, impuesto sobre la parte estacionaria de un dispositivo por la parte giratoria a medida que se suministra o absorbe energía. Si la fuente de carga se mantiene rígida mientras la fuente de mando intenta girar, se detecta la torsión. Los sensores de torsión de reacción están restringidos para que no puedan girar 360 grados sin que el cable se enrolle porque la carcasa o la cubierta están fijas al elemento sensor. Estos sensores se utilizan comúnmente para medir la torsión de un movimiento de tipo de agitación hacia adelante y hacia atrás. Debido a que estos sensores no utilizan rodamientos, anillos colectores o cualquier otro elemento giratorio, su instalación y uso pueden ser muy rentables.
Sensores de torsión rotativos
Los sensores de torsión giratorios son similares en diseño y aplicación a los sensores de torsión de reacción, excepto que el sensor de torsión se instala alineado con el dispositivo bajo prueba. Dado que el eje de un sensor de torsión gira 360 grados, estos sensores deben tener una manera de transferir las señales desde el elemento giratorio a una superficie estacionaria.
Usted puede lograr esto utilizando uno de los tres métodos de montaje comunes: anillos colectores, transformadores rotativos o telemetría.
Método de anillo colector:
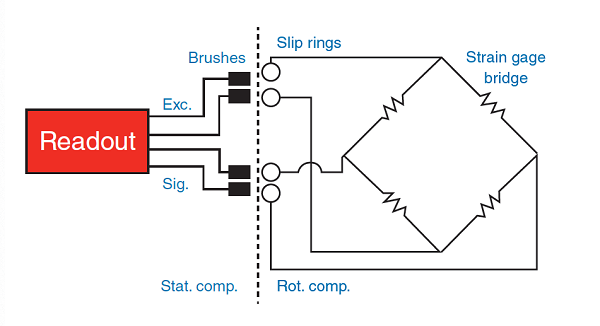
Para el método de anillo colector, el puente de la galga extensiométrica está conectado a cuatro anillos colectores plateados montados en el eje giratorio. Las escobillas de grafito plateado rozan estos anillos colectores y proporcionan una ruta eléctrica para la excitación del puente entrante y la señal saliente. Puede usar AC o DC para excitar el puente de la galga extensiométrica.
Método de transformador rotativo:
Para el método del transformador, los transformadores giratorios se diferencian de los transformadores convencionales solo en que el bobinado primario o secundario está girando. Se usa un transformador para transmitir el voltaje de excitación de AC al puente de la galga extensiométrica y se usa un segundo transformador para transferir la salida de la señal a la parte no giratoria del transductor. Por lo tanto, dos transformadores reemplazan cuatro anillos colectores y no se requiere contacto directo entre los elementos giratorios y estacionarios del transductor.
Método de telemetría digital:
El método de telemetría digital no tiene puntos de contacto. El sistema consta de un módulo receptor-transmisor, un módulo de acoplamiento y un módulo de procesamiento de señales. El módulo transmisor está integrado en el sensor de torsión. Amplifica, digitaliza y modula la señal del sensor en una onda portadora de radiofrecuencia que es captada por el módulo de acoplamiento del calibrador (receptor). El módulo de procesamiento de señales recupera los datos de medidas digitales.
Elegir el sensor de torsión adecuado
La selección del sensor de torsión depende principalmente de sus necesidades de capacidad y requisitos físicos o ambientales.
Capacidad—Para seleccionar la capacidad correcta, determine la torsión mínima y máxima que espera. La torsión y los momentos extraños pueden aumentar la tensión combinada, lo que acelera la fatiga y afecta la precisión y el rendimiento del sensor. Cualquier carga que no sea de torsión, como axial, radial o de flexión, se considera extraña y debe determinarse con anticipación. Si usted no puede organizar su instalación para minimizar los efectos de estas cargas, consulte la documentación del sensor para verificar que las cargas extrañas estén dentro de los valores del sensor.
Requisitos físicos y ambientales—Evalúe cualquier restricción física (longitud, diámetro, etc.) y la manera en que se puede montar el sensor de torsión en su sistema. Considere en qué tipo de entorno funcionará el sensor para garantizar un rendimiento adecuado en amplios rangos de temperatura, humedad o contaminantes (aceite, suciedad, polvo).
Revoluciones por minuto (rpm)—Para sensores de torsión rotativos, debe comprender cuánto tiempo estará girando el sensor de torsión y a qué velocidad para determinar las RPM.
Acondicionamiento de señales para sensores de torsión
Los sensores de torsión pueden estar acondicionados o no acondicionados. Usted puede conectar sensores acondicionados directamente a un dispositivo DAQ porque contienen los componentes necesarios para filtrado, amplificación de la señal y los cables de excitación junto con los circuitos regulares para las medidas. Si está trabajando con sensores no acondicionados, debe considerar varios elementos de acondicionamiento de señales para crear un sistema eficaz de medidas de torsión basado en puente. Es posible que necesite uno o más de los siguientes elementos:
- Excitación para alimentar el circuito de puente Wheatstone—Conozca más en el recurso de medidas de tensión
- Detección remota para compensar errores en el voltaje de excitación de cables conductores largos
- Amplificación para aumentar la resolución de la medida y mejorar la relación señal-ruido
- Filtrado para eliminar el ruido externo de alta frecuencia
- Anulación de desfase para equilibrar el puente para producir 0 V cuando no se aplica tensión
- Calibración de derivación para verificar la salida del puente a un valor conocido y esperado
Para aprender cómo compensar estos errores y revisar otras consideraciones de hardware para medidas de torsión basadas en puente, descargue la Guía del ingeniero para medidas precisas de sensores.
Conectar sensores de torsión con hardware de NI
Una vez que sepa cuáles son sus necesidades de pruebas y sensores, el siguiente paso importante es decidir el hardware para recopilar esos datos. La calidad del hardware de adquisición determina la calidad de los datos que usted recopila.
NI ofrece una variedad de hardware de medidas de fuerza y puente que está diseñado para adquirir datos de torsión y es compatible con una variedad de sensores de torsión basados en puente.
Configuración de hardware
Combine su sensor de torsión con el hardware recomendado
El bundle de tensión y carga CompactDAQ simplifica la conexión de su sensor de torsión con un bundle de módulo(s) de entrada de tensión/puente y un chasis CompactDAQ.

Otros productos para medir la torsión
Los siguientes productos pueden conectarse con sensores de torsión. Estos productos también pueden adquirir medidas de presión, fuerza y torsión. Aprenda más sobre medir presión con sensores de presión basados en puente, tensión con galgas extensiométricas o carga con celdas de carga basadas en puente para elegir los sensores correctos y su uso con productos de NI.


Referencias:
- http://sensing.honeywell.com/white-paper-effectivelyusingpressureloadandtorquesensorswithtodaysdataacqusitionsystems-008883-2-en.pdf
- http://www.pcb.com/linked_documents/force-torque/catalog/sections/ftq200g_0107_6.pdf
- http://www.futek.com/load_cell_selection.aspx
- http://www.himmelstein.com/images/B705.pdf