Consideraciones de ruido y cableado en campo para señales analógicas
Información general
Contenido
- Tipos de fuentes de señal y sistemas de medidas
- Medir fuentes de señal conectadas a tierra
- Medir fuentes flotantes (no referenciadas)
- Minimizar el acoplamiento de ruido en las interconexiones
- Sistemas equilibrados
- Solución de problemas de ruido en configuraciones de medida
- Técnicas de procesamiento de señales para la reducción de ruido
- Referencias:
- Aprenda más
Tipos de fuentes de señal y sistemas de medidas
Con mucho, el equivalente eléctrico más común producido por los circuitos de acondicionamiento de señal asociado con los sensores está en forma de voltaje. La transformación a otros fenómenos eléctricos, como la corriente y la frecuencia, puede encontrarse en los casos en que la señal se transmite a través de cables largos en entornos severos. Dado que en prácticamente todos los casos la señal transformada se convierte nuevamente en una señal de voltaje antes de la medida, es importante entender la fuente de la señal de voltaje.
Recuerde que una señal de voltaje se mide como la diferencia de potencial entre dos puntos. Esto se describe en la Figura 1.
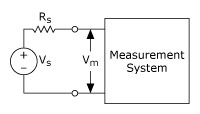
Figura 1. Modelo de fuente de señal de voltaje y sistema de medida
Una fuente de voltaje se puede agrupar en una de dos categorías: con conexión a tierra o sin conexión a tierra (flotante). De manera similar, un sistema de medidas se puede agrupar en una de dos categorías: con conexión a tierra o referenciado a tierra, y sin conexión a tierra (flotante).
Fuentes de señal conectadas a tierra o referenciadas a tierra
Una fuente conectada a tierra es aquella en la que la señal de voltaje está referenciada a la conexión a tierra del sistema del edificio. El ejemplo más común de una fuente conectada a tierra es cualquier instrumento común insertable que no flota explícitamente su señal de salida. La Figura 2 muestra una fuente de señal conectada a tierra.
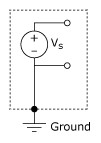
Figura 2. Fuente de señal conectada a tierra
Las tierras de dos fuentes de señal conectadas a tierra generalmente no tendrán el mismo potencial. La diferencia en el potencial a tierra entre dos instrumentos conectados al mismo sistema de potencia está generalmente entre 10 mV y 200 mV; pero la diferencia puede ser mucho mayor si los circuitos de distribución de potencia no están conectados adecuadamente.
Fuente de señal sin conexión a tierra o no referenciada (flotante)
Una fuente flotante es una fuente en la cual la señal de voltaje no está conectada a una referencia absoluta, como a la tierra directamente o a la tierra de las instalaciones. Algunos ejemplos comunes de fuentes de señal flotantes son baterías, fuentes de señal alimentadas por batería, termopares, transformadores, amplificadores de aislamiento y cualquier instrumento que explícitamente flote su señal de salida. En la Figura 3 se describe una fuente de señal flotante o no referenciada.
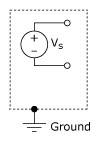
Figura 3. Fuente de señal flotante o no referenciada
Observe que ninguna de las terminales de la fuente está referenciada a la toma de corriente eléctrica a tierra. Así, cada terminal es independiente de la tierra.
Sistema de medidas diferencial o no referenciada
Un sistema de medidas diferencial o no referenciado, no tiene ninguna de sus entradas sujetas a una referencia fija, como a tierra. Los instrumentos de mano que funcionan con baterías y los dispositivos de adquisición de datos con amplificadores de instrumentación son ejemplos de sistemas de medidas diferenciales o no referenciados. La Figura 4 muestra una implementación de un sistema de medidas diferencial de 8 canales utilizado en un dispositivo típico de NI. Los multiplexores analógicos se utilizan en la ruta de la señal para aumentar el número de canales de medida mientras se usa un solo amplificador de instrumentación. Para este dispositivo, el pin etiquetado AI GND, la tierra de entrada analógica, es la tierra del sistema de medidas.
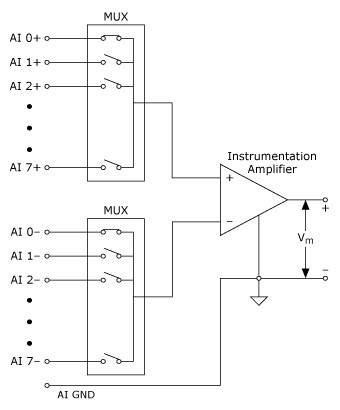
Figura 4. Un sistema de medida diferencial de 8 canales
Un sistema de medidas diferencial ideal responde únicamente a la diferencia de potencial entre sus dos terminales: las entradas (+) y (-). Cualquier voltaje medido con respecto a la tierra del amplificador de instrumentación que está presente en ambas entradas del amplificador se denomina voltaje de modo común. El voltaje de modo común es rechazado completamente (no es medido) por un sistema de medidas diferencial ideal. Esta capacidad es útil para rechazar el ruido, ya que a menudo se introduce ruido no deseado en el circuito que constituye el sistema de cableado como voltaje de modo común. Sin embargo, los dispositivos prácticos tienen varias limitaciones, descritas por parámetros tales como el rango de voltaje en modo común y la relación de rechazo en modo común (CMRR), que limitan esta capacidad para rechazar el voltaje en modo común.
Voltaje de modo común Vcm se define como sigue:
donde V+ = Voltaje en la terminal de no inversión del sistema de medidas con respecto a la tierra del sistema de medidas, V– = Voltaje en la terminal de no inversión del sistema de medidas con respecto a la tierra del sistema de medidas y CMRR en dB se define de la siguiente manera:
En la Figura 5 se muestra un circuito simple que ilustra el CMRR. En este circuito, CMRR en dB se mide como 20 log Vcm/Vout donde V+ = V– = Vcm.
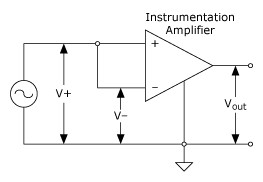
Figura 5. Circuito de medidas CMRR
El rango de voltaje en modo común limita la variación de voltaje permitida en cada entrada con respecto a la conexión a tierra del sistema de medidas. La violación de esta restricción da como resultado no solo un error de medida, sino también un posible daño a los componentes del dispositivo. Como lo indica el término, el CMRR mide la capacidad de un sistema de medidas diferencial para rechazar la señal de voltaje en modo común. El CMRR es una función de la frecuencia y por lo general se reduce con la frecuencia. El CMRR se puede optimizar utilizando un circuito equilibrado. Este problema se trata con más detalle más adelante en esta nota de aplicación. La mayoría de los dispositivos de adquisición de datos especificarán el CMRR hasta 60 Hz, la frecuencia de la línea de alimentación.
Sistema de medidas con conexión a tierra o referenciado a tierra
Un sistema de medidas conectado a tierra o referenciado a tierra es similar a una fuente conectada a tierra en que la medida se realiza con respecto a la conexión a tierra. La Figura 6 muestra un sistema de medidas conectado a tierra de 8 canales. Esto también se conoce como sistema de medidas de una sola terminal.
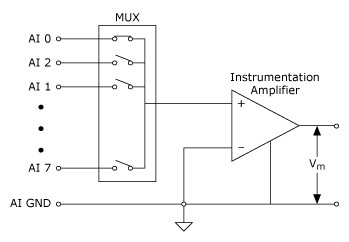
Figura 6. Un sistema de medidas de 8 canales de una sola terminal referenciada a tierra (RSE)
Una variante de la técnica de medida de una sola terminal, conocida como una sola terminal no referenciada (NRSE), a menudo se encuentra en los dispositivos de adquisición de datos. En la Figura 7 se describe n sistema de medidas NRSE.
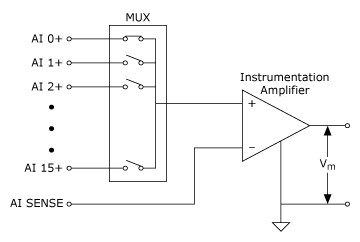
Figura 7. Un sistema de medidas NRSE de 8 canales
En un sistema de medida NRSE, todas las medidas son realizadas con respecto a una señal de entrada analógica de una sola terminal (AI SENSE), pero el potencial en este nodo puede variar con respecto a la tierra del sistema de medidas (AI GND). La Figura 7 ilustra que un sistema de medidas NRSE de un solo canal es lo mismo que un sistema de medidas diferencial de un solo canal.
Ahora que hemos identificado los diferentes tipos de fuente de señal y sistemas de medidas, podemos analizar el sistema de medidas adecuado para cada tipo de fuente de señal.
Medir fuentes de señal conectadas a tierra
Una fuente de señal conectada a tierra se mide mejor con un sistema de medidas diferencial o no referenciado. La Figura 8 muestra la desventaja de usar un sistema de medidas con referencia a tierra para medir una fuente de señal conectada a tierra. En este caso, el voltaje medido, Vm, es la suma del voltaje de señal, Vs, y la diferencia de potencial, DVg, que existe entre la tierra de la fuente de la señal y la tierra del sistema de medidas. Esta diferencia de potencial generalmente no es un nivel de DC; por lo tanto, el resultado es un sistema de medidas ruidoso que a menudo muestra componentes de frecuencia de línea eléctrica (60 Hz) en las lecturas. El ruido introducido en el ciclo a tierra puede tener componentes tanto de AC como de DC, lo que introduce errores de desfase así como ruido en las medidas. La diferencia de potencial entre las dos tierras hace que fluya una corriente en la interconexión. Esta corriente se llama corriente de ciclo a tierra.
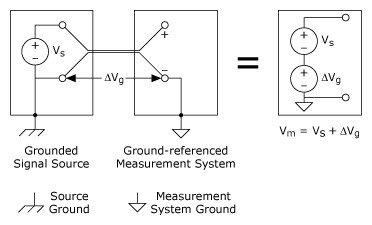
Figura 8. Una fuente de señal conectada a tierra medida con un sistema referenciado a tierra introduce ciclos a tierra
Un sistema referenciado a tierra todavía se puede usar si los niveles de voltaje de la señal son altos y el cableado de interconexión entre la fuente y el dispositivo de medida tiene una baja impedancia. En este caso, la medida del voltaje de la señal se degrada por el ciclo a tierra, pero la degradación puede ser tolerable. La polaridad de una fuente de señal conectada a tierra debe observarse cuidadosamente antes de conectarla a un sistema de medidas referenciado a tierra, ya que la fuente de la señal puede cortarse a tierra, lo que posiblemente dañe la fuente de la señal. Las consideraciones de cableado se discuten con más detalle más adelante en esta nota de aplicación.
Una medida no referenciada es proporcionada por las configuraciones de entrada diferencial (DIFF) y NRSE en un dispositivo típico de adquisición de datos. Con cualquiera de estas configuraciones, cualquier diferencia potencial entre las referencias de la fuente y el dispositivo de medida aparece como voltaje de modo común para el sistema de medida y se resta de la señal medida. Esto se ilustra en la Figura 9.
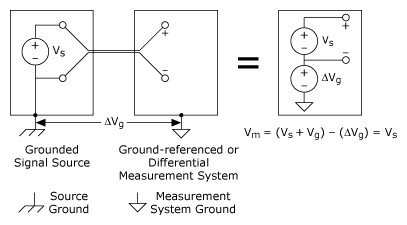
Figura 9. Un sistema de medidas diferencial utilizado para medir una fuente de señal conectada a tierra
Medir fuentes flotantes (no referenciadas)
Las fuentes de señal flotantes se pueden medir con sistemas de medidas tanto diferenciales como de una sola terminal. Sin embargo, en el caso del sistema de medida diferencial, se debe tener cuidado de asegurar que el nivel de voltaje de modo común de la señal con respecto a la conexión a tierra del sistema de medida permanezca en el rango de entrada de modo común del dispositivo de medida.
Una variedad de fenómenos, por ejemplo, las corrientes de polarización de entrada del amplificador de instrumentación, pueden mover el nivel de voltaje de la fuente flotante fuera del rango válido de la etapa de entrada de un dispositivo de adquisición de datos. Para anclar este nivel de voltaje a alguna referencia, las resistencias se usan como se ilustra en la Figura 10. Estas resistencias, llamadas resistencias de polarización, proporcionan una ruta de DC desde las entradas del amplificador de instrumentación a la tierra del amplificador de instrumentación. Estas resistencias deben tener un valor lo suficientemente grande como para permitir que la fuente flote con respecto a la referencia de medida (AI GND en el sistema de medidas descrito anteriormente) y no cargar la fuente de señal, pero lo suficientemente pequeño para mantener el voltaje en el rango de la etapa de entrada del dispositivo. Por lo general, los valores entre 10 kΩ y 100 kΩ funcionan bien con fuentes de baja impedancia, como termopares y salidas de módulos de acondicionamiento de señales. Estas resistencias de polarización están conectadas entre cada cable y la tierra del sistema de medidas.
Advertencia: Si no se usan estos resistores, se producirán lecturas erráticas o saturadas (escala completa positiva o escala completa negativa).
Si la señal de entrada está acoplada en DC, únicamente se requiere una resistencia conectada desde la entrada (-) a la tierra del sistema de medida para satisfacer el requisito de la trayectoria de la corriente de polarización, pero esto conduce a un sistema no equilibrado si la impedancia de la fuente de la señal es relativamente alto. Los sistemas equilibrados son deseables desde el punto de vista de la inmunidad al ruido. Por consiguiente, deben usarse dos resistencias de igual valor, una para la entrada de señal alta (+) y la otra para la señal de entrada baja (-) a tierra, si la impedancia de la fuente de la señal es alta. Una sola resistencia de polarización es suficiente para fuentes acopladas en DC de baja impedancia, como los termopares. Los circuitos equilibrados se explican más adelante en esta nota de aplicación.
Si la señal de entrada está acoplada a AC, se requieren dos resistencias de polarización para satisfacer el requisito de la trayectoria de corriente de polarización del amplificador de instrumentación.
Las resistencias (10 kΩ <R <100 kΩ) proporcionan una trayectoria de retorno a tierra para las corrientes de polarización de entrada del amplificador de instrumentación, como se muestra en la Figura 10. Solamente se requiere R2 para las fuentes de señal acopladas en DC. Para fuentes acopladas en AC, R1 = R2.
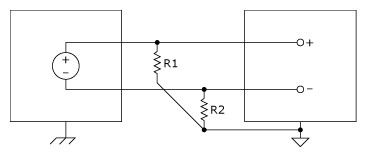
Figura 10. Configuración de fuente flotante y entrada diferencial
Si se va a usar el modo de entrada de una sola terminal, se puede usar un sistema de entrada RSE (Figura 11a) para una fuente de señal flotante. En este caso, no se crea ningún ciclo a tierra. El sistema de entrada NRSE (Figura 11b) también se puede usar y es preferible desde un punto de vista de captación de ruido. Las fuentes flotantes requieren resistencias de polarización entre la entrada AI SENSE y la tierra del sistema de medidas (AI GND) en la configuración de entrada NRSE.
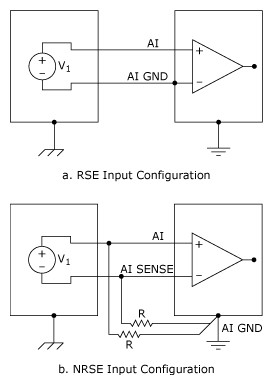
Figura 11. Configuraciones de fuente de señal flotante y de una sola terminal
En la Tabla 1 se presenta resumen gráfico de la discusión anterior.
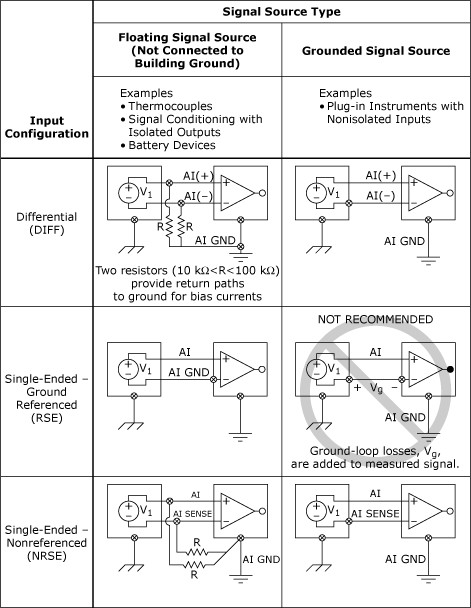
Tabla 1. Conexiones de entrada analógica
Nota: ¡No se recomienda una sola terminal referenciada a tierra (RSE) cuando se utiliza una fuente de señal conectada a tierra!
Advertencia: Deben proporcionarse resistencias de polarización cuando se miden fuentes de señales flotantes en configuraciones DIFF y NRSE. De no ser así, se producirán lecturas erráticas o saturadas (escala completa positiva o escala completa negativa).
En general, es preferible un sistema de medida diferencial porque rechaza no solo los errores inducidos por el ciclo a tierra, sino también el ruido captado en el entorno hasta cierto punto. Las configuraciones de una sola terminal, por otro lado, proporcionan el doble de canales de medida, pero se justifican solamente si la magnitud de los errores inducidos es menor que la precisión requerida de los datos. Las conexiones de entrada de una sola terminal se pueden usar cuando todas las señales de entrada cumplen con los siguientes criterios.
- Las señales de entrada son de alto nivel (más de 1 V)
- El cableado de la señal es relativamente corto y viaja a través de un entorno libre de ruido o está aislado adecuadamente
- Todas las señales de entrada pueden compartir una señal de referencia común en la fuente
Las conexiones diferenciales se deben utilizar cuando se viole cualquiera de los criterios anteriores.
Minimizar el acoplamiento de ruido en las interconexiones
Incluso cuando una configuración de medida evita los ciclos a tierra o la saturación de la etapa de entrada analógica siguiendo las pautas anteriores, la señal medida inevitablemente incluirá una cierta cantidad de ruido o señal no deseada "captada" por el entorno. Esto es especialmente cierto para señales analógicas de bajo nivel que se amplifican utilizando el amplificador integrado que está disponible en muchos dispositivos de adquisición de datos. Para empeorar las cosas, las tarjetas de adquisición de datos de PC generalmente tienen algunas señales digitales de entrada/salida en el conector de E/S. Como consecuencia, cualquier actividad en estas señales digitales provista por o hacia la tarjeta de adquisición de datos que viaja a través de cierta longitud cerca de las señales analógicas de bajo nivel en el propio cable de interconexión puede ser una fuente de ruido en la señal amplificada. Para minimizar el acoplamiento de ruido de esta y otras fuentes extrañas, puede ser necesario un esquema adecuado de cableado y blindaje.
Antes de continuar con una discusión sobre el cableado y el blindaje adecuados, es necesario comprender la naturaleza del problema del acoplamiento de ruido de interferencia. No hay una solución única para el problema de acoplamiento de ruido. Además, una solución inadecuada podría empeorar el problema.
En la Figura 12 se muestra un problema de interferencia o acoplamiento de ruido.
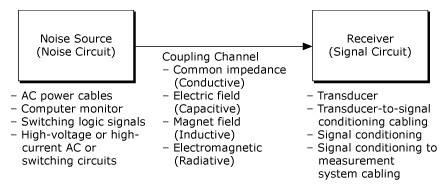
Figura 12. Diagrama de bloques de problemas de acoplamiento de ruido
Como se muestra en la Figura 12, hay cuatro mecanismos principales de "captación" o acoplamiento de ruido: conductivo, capacitivo, inductivo y radiativo. El acoplamiento conductivo resulta de compartir corrientes de diferentes circuitos en una impedancia común. El acoplamiento capacitivo resulta de campos eléctricos que varían con el tiempo en la vecindad de la trayectoria de la señal. El ruido inductivo o magnéticamente acoplado resulta de campos magnéticos variables en el tiempo en el área encerrada por el circuito de señal. Si la fuente del campo electromagnético está lejos del circuito de señal, el acoplamiento del campo eléctrico y magnético se considera un acoplamiento combinado electromagnético o radiativo.
Ruido acoplado de manera conductiva
El ruido acoplado de manera conductiva existe porque los conductores de cableado tienen una impedancia finita. Se debe tener en cuenta el efecto de estas impedancias de cableado al diseñar un esquema de cableado. El acoplamiento conductivo puede eliminarse o minimizarse rompiendo los ciclos a tierra (si los hay) y proporcionando retornos a tierra separados para señales de alta potencia de bajo y alto nivel. En la Figura 13a se ilustra un esquema de conexión a tierra en serie que resulta en un acoplamiento conductivo.
Si la resistencia del cable de retorno común de A a B es 0.1 Ω, el voltaje medido del sensor de temperatura variaría en 0.1 Ω * 1 A = 100 mV, dependiendo de si el interruptor está cerrado o abierto. Esto se traduce en 10 ° de error en la medida de la temperatura. El circuito de la Figura 13b proporciona retornos a tierra separados; por lo tanto, la salida del sensor de temperatura medida no varía conforme se activa y desactiva la corriente en el circuito de carga pesada.
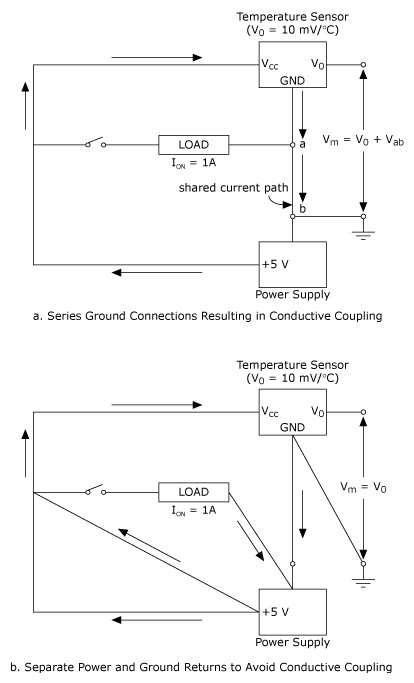
Figura 13. Ruido acoplado de manera conductiva
Acoplamiento capacitivo e inductivo
La herramienta analítica requerida para describir la interacción de los campos eléctrico y magnético de los circuitos de ruido y señal es la ecuación de Maxwell matemáticamente no trivial. Sin embargo, para una comprensión intuitiva y cualitativa de estos canales de acoplamiento, se pueden usar equivalentes de circuitos agrupados. Las figuras 14 y 15 muestran el circuito agrupado equivalente del acoplamiento del campo eléctrico y magnético.
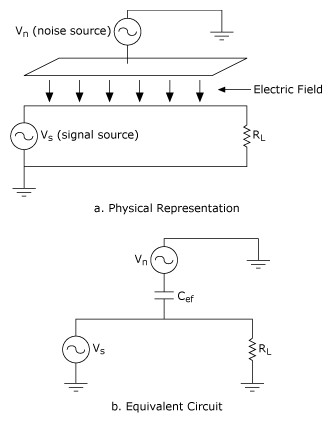
Figura 14. Acoplamiento capacitivo entre la fuente de ruido y el circuito de señal, modelado por el capacitor Cef en el circuito equivalente
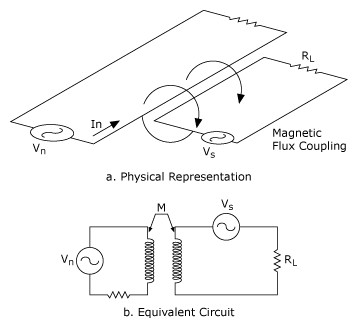
Figura 15. Acoplamiento inductivo entre la fuente de ruido y el circuito de señal, modelado por la inductancia mutua M en el circuito equivalente
La introducción de modelos equivalentes de circuito agrupado en el circuito de ruido equivalente maneja una violación de los dos supuestos subyacentes del análisis del circuito eléctrico; es decir, todos los campos eléctricos se limitan al interior de los capacitores, y todos los campos magnéticos se limitan al interior de los inductores.
Acoplamiento capacitivo
La utilidad del circuito concentrado equivalente de los canales de acoplamiento se puede ver ahora. Un acoplamiento de campo eléctrico se modela como una capacitancia entre los dos circuitos. La capacitancia equivalente Cef es directamente proporcional al área de superposición e inversamente proporcional a la distancia entre los dos circuitos. Por lo tanto, aumentar la separación o minimizar la superposición minimizará Cef y por lo tanto el acoplamiento capacitivo del circuito de ruido al circuito de señal. Otras características del acoplamiento capacitivo también pueden derivarse del modelo. Por ejemplo, el nivel de acoplamiento capacitivo es directamente proporcional a la frecuencia y amplitud de la fuente de ruido y a la impedancia del circuito receptor. Por lo tanto, el acoplamiento capacitivo puede disminuirse, reduciendo el voltaje o la frecuencia de la fuente de ruido o reduciendo la impedancia del circuito de señal. La capacitancia equivalente Cef también se puede reducir empleando blindaje capacitivo. El blindaje capacitivo funciona al desviar o proporcionar otra trayectoria para la corriente inducida, por lo que no se transporta en el circuito de señal. Un blindaje capacitivo adecuado requiere atención tanto de la ubicación del blindaje como de la conexión del blindaje. El blindaje debe colocarse entre los conductores acoplados de manera capacitiva y conectarse a tierra solo en el extremo de la fuente. Las corrientes de tierra significativas se transportarán en la protección si se conecta a tierra en ambos extremos. Por ejemplo, una diferencia de potencial de 1 V entre las conexiones a tierra puede forzar 2 A de la corriente a tierra en el blindaje si tiene una resistencia de 0.5 Ω. Las diferencias potenciales en el orden de 1 V pueden existir entre las tierras. El efecto de esta corriente a tierra potencialmente grande se explorará más a fondo en la discusión del ruido acoplado de manera inductiva. Como regla general, el metal conductivo o el material conductivo que se encuentra cerca de la trayectoria de la señal tampoco debe dejarse flotando eléctricamente, ya que el ruido acoplado de manera capacitiva puede aumentar.
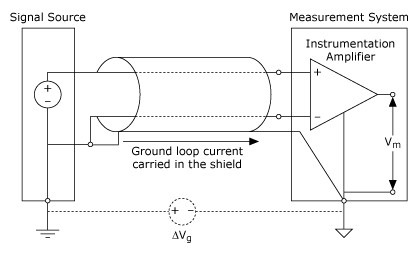
Figura 16. Terminación de blindaje incorrecta—las corrientes a tierra se transportan en el blindaje
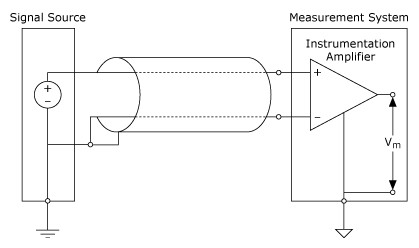
Figura 17. Terminación de blindaje correcta—no fluye corriente a tierra o señal a través del blindaje
Acoplamiento inductivo
Como se describió anteriormente, el acoplamiento inductivo resulta de campos magnéticos variables en el tiempo en el área encerrada por el ciclo del circuito de señal. Estos campos magnéticos son generados por corrientes en circuitos de ruido cercanos. El voltaje Vn inducido en el circuito de señal es dado por la fórmula:
donde f es la frecuencia de la densidad de flujo que varía de manera sinusoidal, B es el valor rms de la densidad de flujo, A es el área del circuito del circuito de señal y Æ es el ángulo entre la densidad de flujo B y el área A.
El modelo equivalente de circuito agrupado de acoplamiento inductivo es la inductancia mutua M, como se muestra en la Figura 15 (b). En términos de la inductancia mutua M, Vn es dada por la fórmula:
donden es el valor rms de la corriente sinusoidal en el circuito de ruido, y f es su frecuencia.
Debido a que M es directamente proporcional al área del ciclo del circuito del receptor e inversamente proporcional a la distancia entre el circuito de la fuente de ruido y el circuito de la señal, aumentando la separación o minimizando el área del circuito de la señal minimizará el acoplamiento inductivo entre los dos circuitos. Reduciendo la corriente In en el circuito de ruido o reduciendo su frecuencia también se puede reducir el acoplamiento inductivo. La densidad de flujo B del circuito de ruido también puede reducirse cruzando los cables de la fuente de ruido. Finalmente, el blindaje magnético se puede aplicar a la fuente de ruido o al circuito de señal para minimizar el acoplamiento.
Proteger contra campos magnéticos de baja frecuencia no es tan fácil como proteger contra campos eléctricos. La efectividad del blindaje magnético depende del tipo de material: su permeabilidad, su espesor y las frecuencias involucradas. Debido a su alta permeabilidad relativa, el acero es mucho más efectivo que el aluminio y el cobre como una protección para campos magnéticos de baja frecuencia (aproximadamente por debajo de 100 kHz). Sin embargo, a frecuencias más altas, también se puede usar aluminio y cobre. La pérdida por absorción de cobre y acero para dos espesores se muestra en la Figura 18. Las propiedades de blindaje magnético de estos metales son bastante ineficaces a bajas frecuencias, como las de la línea de alimentación (50 a 60 Hz), que son las principales fuentes de ruido de baja frecuencia y acopladas magnéticamente en la mayoría de los entornos. Se pueden encontrar mejores protecciones magnéticas como Mumetal para el blindaje magnético de baja frecuencia, pero Mumetal es muy frágil y puede tener una degradación severa de su permeabilidad y, por lo tanto, una degradación de su eficacia como una protección magnética por impacto mecánico.
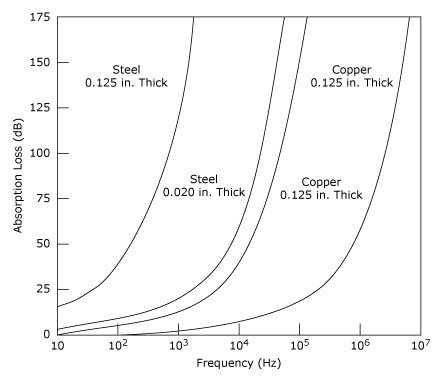
Figura 18. Pérdida de absorción como una función de la frecuencia (de la Referencia 1)
Debido a la falta de control sobre los parámetros del circuito de ruido y la relativa dificultad para lograr el blindaje magnético, reducir el área de ciclo del circuito de señal es una forma efectiva de minimizar el acoplamiento inductivo. El cableado de par cruzado es beneficioso porque reduce tanto el área de ciclo en el circuito de señal y cancela los errores inducidos.
La fórmula (2) determina el efecto de transportar corrientes de ciclo a tierra en el blindaje para el circuito en la Figura 16. Para In = 2 A; f = 60 Hz; y M = 1 µH/ft para un cable de 10 pies resulta en lo siguiente:
Este nivel de ruido se traduce en 3.1 LSB para un rango de 10 V, un sistema de adquisición de datos de 12 bits. La efectividad del sistema de adquisición de datos se reduce aproximadamente a la de un sistema de adquisición de 10 bits.
Cuando se usa un dispositivo de la Serie E con un cable blindado en modo diferencial, el área del ciclo del circuito de señal se minimiza porque cada par de cables de señal se configura como un par cruzado. Esto no es cierto para el modo de una sola terminal con el mismo dispositivo y cable porque las áreas del ciclo de diferentes tamaños pueden formarse con diferentes canales.
Las fuentes de señal de corriente son más inmunes a este tipo de ruido que las fuentes de señal de voltaje porque el voltaje inducido magnéticamente aparece en serie con la fuente, como se muestra en la Figura 19. V21 y V22 son fuentes de ruido acopladas de manera inductiva, y Vc es una fuente de ruido acoplada de manera capacitiva.
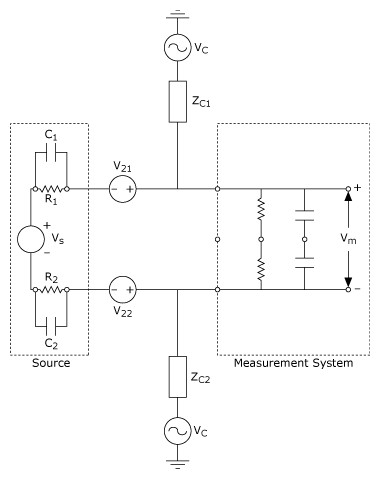
Figura 19. Modelo del circuito de acoplamiento de voltaje de ruido inductivo y capacitivo
(H. W. Ott, Técnicas de reducción de ruido en sistemas electrónicos, Wiley, 1976.)
El nivel de acoplamiento tanto inductivo como capacitivo depende de la amplitud de ruido y la proximidad de la fuente de ruido y el circuito de señal. Por lo tanto, es beneficioso aumentar la separación de los circuitos que interfieren y reducir la amplitud de la fuente de ruido. El acoplamiento conductivo resulta del contacto directo; por lo tanto, aumentar la separación física del circuito de ruido no es útil.
Acoplamiento radiativo
El acoplamiento radiativo de fuentes de radiación, como estaciones de radio y televisión y canales de comunicación, normalmente no serían consideradas fuentes de interferencia para los sistemas de medida de ancho de banda de baja frecuencia (menos de 100 kHz). Pero el ruido de alta frecuencia puede ser rectificado e introducido en circuitos de baja frecuencia a través de un proceso llamado rectificación de audio. Este proceso resulta de las uniones no lineales en los circuitos integrados que actúan como rectificadores. Filtros simples, pasivos de paso bajo R-C en el extremo del receptor del cableado largo pueden reducir la rectificación de audio.
La terminal ubicua de computadora es una fuente de interferencia de campo magnético y eléctrico en circuitos sensibles cercanos. Esto se ilustra en la Figura 20, que muestra los gráficos de datos obtenidos con un dispositivo de adquisición de datos que utiliza una ganancia de 500 con el amplificador de ganancia programable incorporado. La señal de entrada es un cortocircuito en el bloque de terminación. Se utilizó un cable de interconexión sin blindaje de 0.5 m entre el bloque terminal y el conector de E/S del dispositivo. Para la conexión de señal diferencial, las entradas de canal alto y canal bajo se conectaron entre sí y a la tierra del sistema analógico. Para la conexión de una sola terminal, la entrada del canal se vinculó a la tierra del sistema analógico.
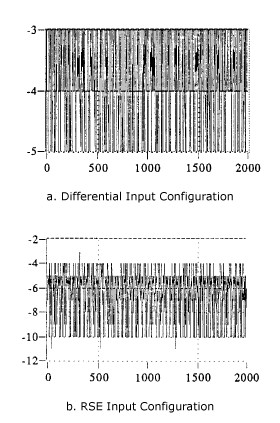
Figura 20. Inmunidad al ruido de la configuración de entrada diferencial en comparación con la configuración RSE (ganancia de la tarjeta DAQ: 500; cable: 0.5 m sin blindaje; fuente de ruido: monitor de PC)
Fuentes de ruido misceláneas
Siempre que esté involucrado el movimiento del cable de interconexión, como en un entorno oscilatorio, se debe prestar atención al efecto triboeléctrico, así como al voltaje inducido debido al cambio del flujo magnético en el ciclo del circuito de la señal. El efecto triboeléctrico es causado por la carga generada en el dieléctrico dentro del cable si no mantiene contacto con los conductores del cable.
El cambio del flujo magnético puede deberse a un cambio en el área del ciclo del circuito de señal causado por el movimiento de uno o ambos conductores, simplemente otra manifestación de acoplamiento inductivo. La solución es evitar colgar cables y sujetar el cableado.
En los circuitos de medida que tratan con circuitos de muy bajo nivel, se debe prestar atención a otra fuente de error de medidas: los termopares inadvertidos que se forman en las uniones de metales diferentes. Los errores debidos a los efectos de los termopares no constituyen errores de tipo de interferencia, pero vale la pena mencionarlos porque pueden ser la causa de misteriosas compensaciones entre canales en medidas de señales de bajo nivel.
Sistemas equilibrados
Al describir el sistema de medida diferencial, se mencionó que el CMRR está optimizado en un circuito equilibrado. Un circuito equilibrado es aquel que cumple con los siguientes tres criterios:
- La fuente está equilibrada: ambas terminales de la fuente (señal alta y señal común) tienen igual impedancia a tierra.
- El cable está equilibrado: ambos conductores tienen la misma impedancia a tierra.
- El receptor está equilibrado: ambas terminales del extremo de medida tienen igual impedancia a tierra.
La captación capacitiva se minimiza en un circuito equilibrado porque el voltaje de ruido inducido es el mismo en ambos conductores debido a sus impedancias iguales a tierra y a la fuente de ruido.
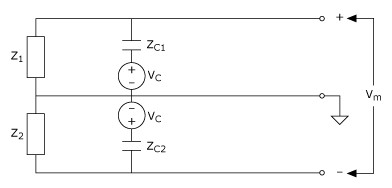
Figura 21. Modelo de circuito de acoplamiento de ruido capacitivo
(H.W. Ott, Técnicas de reducción de ruido en sistemas electrónicos, Wiley, 1976.)
Si el modelo de circuito de la Figura 21 representara un sistema equilibrado, se aplicarían las siguientes condiciones:
Un simple análisis de circuito muestra que para el caso equilibrado V+ = V-, el voltaje acoplado de manera capacitiva Vc aparece como una señal de modo común. Para el caso desequilibrado, es decir, ya sea Z1<> Z2 o Zc1<> Zc2, el voltaje acoplado de manera capacitiva Vc aparece como un voltaje diferencial, es decir, V+<> V-, que no puede ser rechazado por un amplificador de instrumentación. Cuanto mayor sea el desequilibrio en el sistema o el desajuste de las impedancias a tierra y la fuente de ruido de acoplamiento capacitivo, mayor será el componente diferencial del ruido acoplado de manera capacitiva.
Una conexión diferencial presenta un receptor equilibrado en el lado del dispositivo de adquisición de datos del cableado, pero el circuito no está equilibrado si la fuente o el cableado no están equilibrados. Esto se ilustra en la Figura 22. El dispositivo de adquisición de datos está configurado para el modo de entrada diferencial con una ganancia de 500. La impedancia de fuente Rs fue la misma (1 kΩ) en ambas configuraciones. Las resistencias de polarización utilizadas en el circuito de la Figura 22b son ambas de 100 kΩ. El rechazo en modo común es mejor para el circuito en la Figura 22b que para la Figura 22a. Las Figuras 22c y 22d son diagramas en el dominio del tiempo de los datos obtenidos de las configuraciones 22a y 22b, respectivamente. Observe la ausencia de componentes de frecuencia-ruido con la configuración de fuente equilibrada. La fuente de ruido en esta configuración fue el monitor de la PC. La configuración equilibrada también carga la fuente de señal con
Este efecto de carga no debe ser ignorado. La configuración desequilibrada no carga la fuente de la señal.
En una configuración como la de la Figura 22a, el desequilibrio en el sistema (falta de coincidencia en la impedancia a tierra de los conductores de señal alta y baja) es proporcional a la impedancia de la fuente Rs. Para el caso límite Rs = 0 Ω, la configuración en la Figura 22a también está equilibrada y, por lo tanto, menos sensible al ruido.
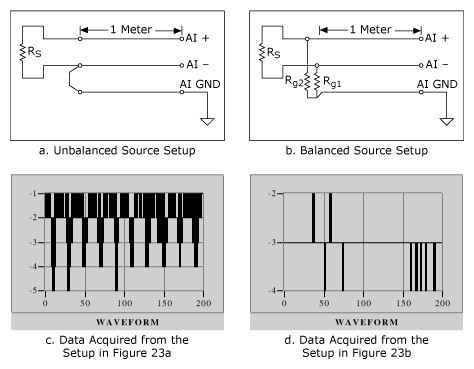
Figura 22. Configuración de la fuente y los datos adquiridos
Los pares cruzados o los pares cruzados blindados son ejemplos de cables equilibrados. El cable coaxial, por otro lado, no está equilibrado porque los dos conductores tienen una capacitancia a tierra diferente.
Características de impedancia de la fuente
Debido a que la impedancia de la fuente es importante para determinar la inmunidad al ruido capacitivo del cableado desde la fuente hasta el sistema de adquisición de datos, las características de impedancia de algunos de los transductores más comunes se enumeran en la Tabla 2.
Transductor
| Característica de impedancia
|
Termopares
| Baja (<20 ohm)
|
Termistores
| Alta (> 1 kohm)
|
Detector de temperatura de resistencia
| Baja (<1 kohm)
|
Transductor de presión de estado sólido
| Alta (> 1 kohm)
|
Galga extensiométrica
| Baja (<1 kohm)
|
Electrodo pH de vidrio
| Muy Alta (1 Gohm)
|
Potenciómetro (desplazamiento lineal)
| Alta (500 ohm a 100 kohm)
|
Las salidas del sensor de alta impedancia y bajo nivel deben procesarse mediante una etapa de acondicionamiento de la señal ubicada cerca del sensor.
Solución de problemas de ruido en configuraciones de medida
Resolver problemas de ruido en una configuración de medidas debe comenzar por ubicar la causa del problema de interferencia. Los problemas de ruido pueden ser desde el transductor hasta el propio dispositivo de adquisición de datos. Se podría usar un proceso de prueba y eliminación para identificar al causante.
El propio dispositivo de adquisición de datos debe verificarse primero presentándolo con una fuente de baja impedancia sin cableado y observando el nivel de ruido de medida. Esto se puede hacer fácilmente con cortocircuito en las señales altas y bajas a la tierra de entrada analógica con un cable lo más corto posible, de preferencia en el conector de E/S del dispositivo de adquisición de datos. Los niveles de ruido observados en esta prueba le darán una idea del mejor caso posible con el dispositivo de adquisición de datos. Si los niveles de ruido medidos no se reducen de los observados en la configuración completa (dispositivo de adquisición de datos más cableado más fuentes de señal), el sistema de medidas por sí mismo es responsable del ruido observado en las medidas. Si el ruido observado en el dispositivo de adquisición de datos no cumple con sus especificaciones, uno de los otros dispositivos en el sistema de cómputo puede ser responsable.
Intente eliminar otras tarjetas del sistema para ver si se reducen los niveles de ruido observados. Cambiar la ubicación de la tarjeta, es decir, la ranura en la que está conectada la tarjeta de adquisición de datos, es otra alternativa.
La colocación de monitores de cómputo podría ser sospechosa. Para medidas de señal de bajo nivel, es mejor mantener el monitor lo más alejado posible del cableado de señal y de la PC. Configurar el monitor en la parte superior de la PC no es deseable al adquirir o generar señales de bajo nivel.
El cableado del acondicionamiento de la señal y el entorno en el que se conecta el cableado al dispositivo de adquisición, se puede verificar a continuación si el dispositivo de adquisición se ha descartado como el culpable. La unidad de acondicionamiento de señal o la fuente de señal deben reemplazarse por una fuente de baja impedancia y deben observarse los niveles de ruido en los datos digitalizados. La fuente de baja impedancia puede ser un cortocircuito directo de las señales altas y bajas a la tierra de la entrada analógica. Esta vez, sin embargo, el corto se encuentra en el extremo más alejado del cable. Si los niveles de ruido observados son aproximadamente los mismos que aquellos con la fuente de señal real en vez del corto en su lugar, el cableado y/o el entorno en el que se conecta el cableado es el culpable. La reorientación del cableado y el aumento de la distancia de las fuentes de ruido son posibles soluciones. Si no se conoce la fuente de ruido, el análisis espectral del ruido puede identificar las frecuencias de interferencia, que a su vez pueden ayudar a localizar la fuente de ruido. Sin embargo, si los niveles de ruido observados son más pequeños que los de la fuente de señal real, se debe probar una resistencia aproximadamente igual a la resistencia de salida de la fuente, en lugar del corto en el extremo del cable. Esta configuración mostrará si el problema es el acoplamiento capacitivo en el cable debido a una alta impedancia de la fuente. Si los niveles de ruido observados en esta última configuración son más pequeños que aquellos con la señal real en su lugar, el cableado y el entorno pueden descartarse como el problema. En este caso, el culpable es la fuente de la señal o la configuración incorrecta del dispositivo de adquisición de datos para el tipo de fuente.
Técnicas de procesamiento de señales para la reducción de ruido
Aunque las técnicas de procesamiento de señales no son un sustituto de la interconexión adecuada del sistema, también pueden emplearse para la reducción de ruido. Todas las técnicas de procesamiento de señales para reducir el ruido se basan en cambiar el ancho de banda de la señal para mejorar la relación señal/ruido. En términos generales, estos pueden clasificarse como medidas previas a la adquisición o posteriores a la adquisición. Ejemplos de técnicas de pre-adquisición son varios tipos de filtrado (paso bajo, paso alto o paso de banda) para reducir el ruido fuera de banda en la señal. El ancho de banda de la medida no necesita exceder la dinámica o el rango de frecuencia del transductor. Las técnicas de post-adquisición se pueden describir como filtrado digital. La técnica de filtrado posterior a la adquisición más simple es promediar. Esto da como resultado el filtrado combinado de los datos adquiridos y es especialmente útil para rechazar frecuencias de interferencia específicas, como 50 a 60 Hz. Recuerde que es más difícil proteger contra el acoplamiento inductivo de fuentes de baja frecuencia, como líneas de alimentación de 50 Hz a 60 Hz. Para un rechazo óptimo de la interferencia al promediar, el intervalo de tiempo de los datos adquiridos utilizados para promediar, Tacq, debe ser un múltiplo integral de Trej = 1 / Frej, donde frej es la frecuencia rechazada de manera óptima.
donde Nciclos es el número de ciclos de frecuencia de interferencia que se promedia. Porque Tacq = Ns ´ Ts donde Ns es el número de muestras utilizadas para promediar y Ts es el intervalo de muestreo, la ecuación (1) se puede escribir de la siguiente manera:
o
La ecuación (4) determina la combinación del número de muestras y el intervalo de muestreo para rechazar una frecuencia de interferencia específica promediando. Por ejemplo, para el rechazo de 60 Hz usando Nciclos = 3 y Ns = 40, podemos calcular la tasa de muestreo óptima de la siguiente manera:
Por lo tanto, el promedio de 40 muestras adquiridas en un intervalo de muestreo de 1.25 ms (u 800 muestras/s) rechazará el ruido de 60 Hz de los datos adquiridos. De manera similar, el promedio de 80 muestras adquiridas a 800 muestras/s (10 lecturas/s) rechazará las frecuencias de 50 y 60 Hz. Al utilizar una técnica de filtrado digital de paso bajo, como promediar, no puede asumir que los datos resultantes no tengan errores de DC, como los desfases causados por los ciclos a tierra. En otras palabras, si un problema de ruido en un sistema de medidas se resuelve promediando, el sistema todavía puede tener errores de desfase de DC. El sistema debe verificarse si la precisión absoluta es crítica para las medidas.
Referencias:
- Ott, Henry W., Técnicas de Reducción de Ruido en Sistemas Electrónicos. Nueva York: John Wiley & Sons, 1976.
- Barnes, John R., Diseño del sistema electrónico: Técnicas de control de ruido e interferencia, Nueva Jersey: Prentice-Hall, Inc., 1987.