Loccioni and Avio Aero Apply Hardware in the Loop to Design, Integrate, Verify, and Validate the Control Systems of New Aircraft Engines
Cristian Lai, Avio Aero
"NI products helped us develop a complete solution. We used several NI DAQ boards and VeriStand to implement an RT architecture, reduce development time by 40 percent, decrease leading time, and increase profit."
- Cristian Lai, Avio Aero
The Challenge:
Loccioni and Avio Aero needed to design and create a scalable, reliable, efficient, and maintainable deterministic real-time software that could acquire several distributed and synchronized I/O, execute different control and process models, and log and monitor a huge amount of data. They also needed to simultaneously design a multi-workstation system for users to monitor and control the complete system.
The Solution:
Loccioni and Avio Aero created a distributed real-time architecture that is interconnected using deterministic bus protocol with low latency. The system uses VeriStand software as the cornerstone of the system because it can integrate several systems and features in a real-time environment without compromising system performance.
Author(s):
Davide Marchei - Find this author in the NI Developer Community
Luca Cesarini - Loccioni
Alessandro De Grassi - Loccioni
Alessio Mazzocchini - Loccioni
Giuseppe Giliberti - Avio Aero
Cristian Lai - Avio Aero
The Wet Rig Control and Conditioning Management System comprises three main subsystems: the data acquisition system (DAS), the main control system (MCS), and the real-time I/O processing system (RTPS). The DAS is a state-of-the-art real-time (RT) target (PXIe-8840 controller with VeriStand RT engine) that logs, monitors, and controls the system. The MCS is an industrial RT target that implements safety rules and low-level automation. These systems control the actuation trajectories computed by the engine simulator (RTPS). To accomplish this, we implement several kinds of regulators generated by different simulation software (The MathWorks, Inc. Simulink® software and LabVIEW software) in the DAS.
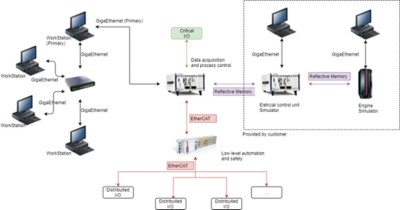
We use several dedicated DAQ modules with 24-bit resolution to acquire all the control feedback signals within all the other signals needed by the automation system. Signals are divided into two categories: single-point (1 KHz) and waveform (100 KHz). We use single-point data for RT data logging (3.5 GB every 15 minutes for eight hours), monitoring (alarms and warning), and actuation. We acquire the data using four PXIe-4302 modules and a PXIe-6363 module. We use waveform data for inline noise and vibration analysis and signal processing (PXIe-4492 and PXIe-4496 modules).
We manage all data from and to the MCS using a deterministic industrial protocol (EtherCAT). Using this network, we can have the MCS get and set data on a distributed plant. We also used a secondary EtherCAT communication between the MCS and DAS, where the PXI is the master EtherCAT and the MCS a slave using a PXIe-8234 module (data exchange more than 3,000 I/O at 2,700 B/ms ). A distributed clock (cycle time less than 100 µs and synchronization less than 1 µs) guarantees the synchronization between the DAS, MCS, and distributed nodes.
We manage all data from and to the RTPS (PXIe-8840) using a fiber optic communication (deterministic transfer rate with only 450 to 500 nanoseconds of latency between nodes). Using this connection, the DAS can exchange process variables with the RTPS. The synchronization between these two PXI is guaranteed by a common clock reference.
We manage the wet rig through four workstations. The main workstation connects directly to the DAS and has the main control of the test rig. In this workstation, the operator can use VeriStand WorkSpace and a custom software created with LabVIEW to control the system. This software uses VeriStand Gateway to access the complete system. The other workstations connect to the main workstation using VeriStand Gateway to analyze and control real-time data.
Results
NI products helped us develop a complete solution. We used several NI DAQ boards and VeriStand to implement an RT architecture, reduce development time by 40 percent, decrease leading time, and increase profit.

Author Information:
Davide Marchei
Find this author in the NI Developer Community