ECU-Virtualisierung: Das Projekt
Überblick
Um die Funktionsweise der elektronischen Steuereinheit (ECU) geschickt zu replizieren, benötigen Sie ein leistungsstarkes Tool für die Entwicklung und das Testen von Automobilanwendungen. Eine empfohlene Methodik zur Virtualisierung von ECUs in Fahrzeugen basiert auf einem systematischen Prozess, der die Vorteile frühzeitiger Tests durch die Einhaltung der vier Schichten der klassischen AUTomotive Open System ARchitecture-Architektur (AUTOSAR-Architektur) von der Anwendung bis zur Mikrocontroller-Abstraktion hervorhebt. In diesem Whitepaper werden wichtige Schritte beschrieben, u. a. die Anwendungsmodellierung und die virtuelle ECU-Simulation (vECU) mit Hilfe der Software VeriStand von NI und der Silver-Software von Synopsys.
Inhalt
- Schwerpunktbereiche für die Virtualisierung von ECUs in Fahrzeugen
- Möglichkeit der Echtzeitsimulation von Fahrzeug-ECUs
- Nächste Schritte
- Quellen
Schwerpunktbereiche für die Virtualisierung von ECUs in Fahrzeugen
Die meisten ECUs folgen einer klaren Architektur (siehe Abbildung 1), die von AUTOSAR entwickelt wurde. Dabei handelt es sich um eine standardisierte Softwarearchitektur, die von Automobilherstellern, Zulieferern und anderen Beteiligten gemeinsam entwickelt wurde. Sie bietet eine gemeinsame Plattform für die Entwicklung, Integration und Verwaltung von Software in modernen Fahrzeugen. Ziel von AUTOSAR ist es, die zunehmende Komplexität elektronischer Systeme im Automobilbereich durch die Definition eines standardisierten Frameworks für Softwarearchitektur, Anwendungsschnittstellen und Kommunikationsprotokolle anzugehen.
Dieser offene und standardisierte Ansatz ermöglicht eine nahtlose Zusammenarbeit unterschiedlicher Fahrzeugsoftwarekomponenten verschiedener Zulieferer, was Interoperabilität und Skalierbarkeit fördert. AUTOSAR fördert die Wiederverwendbarkeit von Softwaremodulen und erleichtert Automobilunternehmen die Entwicklung und Wartung von Software für verschiedene Fahrzeugmodelle und elektronische Steuereinheiten. Dies führt zu effizienteren Entwicklungsprozessen, verkürzter Markteinführungszeit und verbesserter Systemzuverlässigkeit in der Automobilindustrie.
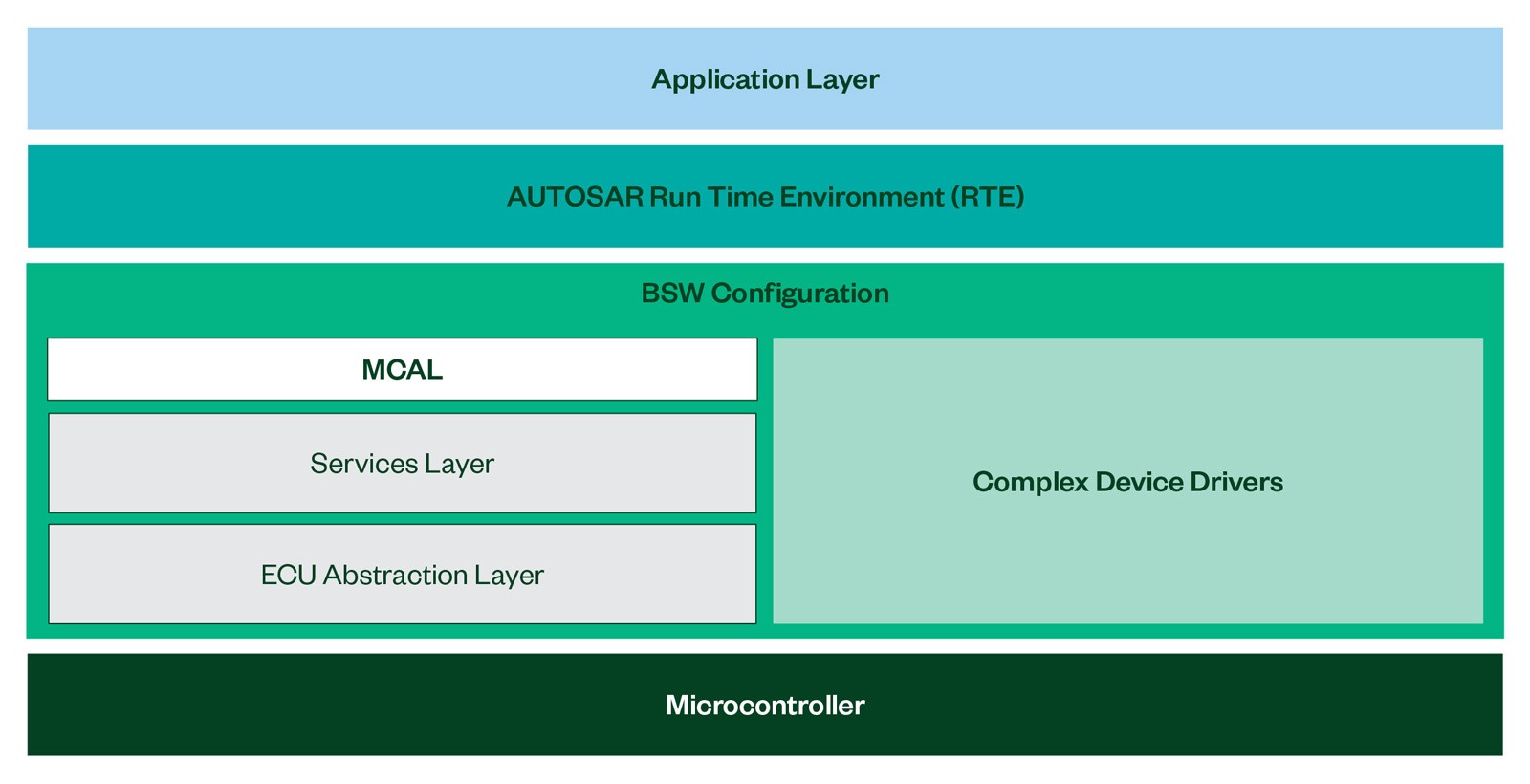
Abbildung 1: ECU-Schichtenarchitektur von AUTOSAR
Wie in Abbildung 1 dargestellt, besteht die AUTOSAR-Architektur aus vier Schichten, die eine ECU mit Leistungsmerkmalen ausstatten. Die Verwendung dieser Architektur in der ECU-Simulation erleichtert die frühzeitige Validierung von Funktionen, wodurch das Warten auf die physische ECU entfällt und der Testprozess beschleunigt wird.
Um einen besseren Überblick über die Funktion jeder Schicht zu gewinnen, wollen wir die ultimativen Aufgaben jeder der vier Schichten der AUTOSAR Classic-Plattformarchitektur untersuchen.
- Anwendungsschicht:
- Implementiert Anwendungscode auf höchster Ebene.
- Ordnet Softwarekomponenten für unterschiedliche Funktionen nach Bedarf an.
- Implementiert standardisierte Schnittstellen für Softwarekomponenten zur Entwicklung von Automobilanwendungen.
- Ermöglicht die Kommunikation zwischen Komponenten über klar definierte Schnittstellen und die Interaktion mit der AUTOSAR-Basissoftwareschicht.
- Triggert die zyklische oder ereignisbasierte Ausführung der eigentlichen Implementierung innerhalb von Softwarekomponenten, wobei ausführbare Entitäten wie der Datenempfang einbezogen werden.
- Laufzeitumgebungsschicht:
- Dient als Middleware-Schicht.
- Stellt Kommunikationsdienste für AUTOSAR-Softwarekomponenten und -Anwendungen mit Sensor-/Aktuatorteilen von AUTOSAR bereit.
- Macht Softwarekomponenten unabhängig von bestimmten ECU-Zuordnungen.
- Bietet Spezialisierung für jede ECU und Anwendung.
- Gewährleistet Autonomie für AUTOSAR-Softwarekomponenten und fördert Flexibilität und Portabilität.
- Basissoftware-Konfigurationsschicht:
- ECU-Abstraktionsschicht:
- Schnittstellen zu Mikrocontroller-Abstraktionsschicht (MCAL) für Peripheriezugriff.
- Stellt eine API für die Interaktion mit Mikrocontrollern bereit, um die Unabhängigkeit von ECU-Hardware zu gewährleisten.
- Erzielt Montageunabhängigkeit von Mikrocontrollern bei Verwendung von ECU-Hardware.
- Komplexer Treiber:
- Verarbeitet komplexe Funktionen (z. B. Einspritzsteuerung).
- Greift direkt auf den Mikrocontroller zu, um spezielle Zeitvorgaben zu erfüllen.
- Richtet eine standardisierte Schnittstelle gemäß AUTOSAR ein.
- Mikrocontroller-Abstraktionsschicht:
- Direktzugriff auf chipeigene Mikrocontroller-Peripheriegeräte und externe Geräte.
- Gewährleistet eine höhere Softwareunabhängigkeit von Mikrocontroller-Spezifikationen.
- Erstellt eine Schnittstelle, die von standardisierten Mikrocontroller-Spezifikationen unberührt bleibt.
- ECU-Abstraktionsschicht:
- Microcontroller-Schicht:
- Dient als Schnittstelle für die Kommunikation zwischen Softwareschichten und Mikrocontroller-Hardware-Peripheriegeräten.
Bei einer detaillierteren Betrachtung dieser Schichten wird deutlich, dass die Anwendungsschicht eine zentrale Rolle spielt, indem sie die Kernfunktionalität der ECU kapselt. Durch die Nutzung des Programmcodes in dieser Schicht können wir unsere vECU genau simulieren.
Möglichkeit der Echtzeitsimulation von Fahrzeug-ECUs
Um eine genaue Simulation einer vECU zu erreichen, ist ein strukturierter Ansatz unerlässlich (siehe Abbildung 2). Daher können wir mit den folgenden Schlüsselschritten unser Ziel erreichen.
- Anwendungsmodellierung: Erstellen Sie mit Hilfe der Software MathWorks® MATLAB® und Simulink® zunächst ein umfassendes Modell, das die Leistungsfähigkeit der ECU originalgetreu darstellt.
- Anwendungserstellung: Erstellen Sie eine genaue Zuordnung der verschiedenen I/O-Signale in der ECU zu AUTOSAR-Komponenten. Diese Zuordnung kann mit Tools wie der MATLAB-Software, der Simulink-Software oder ISOLAR-A* erfolgen.
- Grundlegende Softwarekonfiguration: Replizieren Sie die wesentlichen Softwarekomponenten, die den Betrieb der ECU steuern. Diese Aufgabe kann mit Hilfe von ISOLAR-B* gelöst werden.
- Virtuelle ECU-Erstellung: Starten Sie die Virtualisierung der ECU mit Hilfe einer Konfigurationsdatei mit der Silver-Software von Synopsys.
- Virtuelle ECU-Simulation: Verwenden Sie die NI VeriStand-Software in Kombination mit der Echtzeit-Testplattform NI HIL, die eine effektive Simulation erstellt, da ihre I/O-Schnittstellen dem gewünschten Signaltyp entsprechend rekonfigurierbar sind. Diese Eigenschaft ermöglicht es uns, die vECU entsprechend genauen Kundenspezifikationen zu simulieren. Der nahtlose Übergang zwischen verschiedenen vECUs wird durch einen Klick auf eine Schaltfläche erreicht, sodass Benutzer zwischen simulierten ECUs wechseln können.
* ISOLAR-A und ISOLAR-B beziehen sich auf Software-Tools von ETAS zur Entwicklung von Embedded Software in Fahrzeug-ECUs. Sie helfen bei der Entwicklung von AUTOSAR-konformer Software und standardisieren Architekturen für verbesserte Skalierbarkeit und Interoperabilität. Die neuesten Informationen finden Sie in der offiziellen Dokumentation von ETAS oder im direkten Kontakt.
Die folgende visuelle Darstellung fasst den empfohlenen Prozess für die ECU-Virtualisierung zusammen. Um Sie durch jeden Schritt zu führen, haben wir die empfohlenen Tools von NI optisch hervorgehoben. Darüber hinaus werden in jedem Schritt weitere gängige Tools aufgelistet, die für die jeweiligen Prozesse in Frage kommen. Dieser strukturierte Ansatz zielt darauf ab, Klarheit zu schaffen und fundierte Entscheidungen bei der Implementierung von ECU-Virtualisierungen zu treffen.
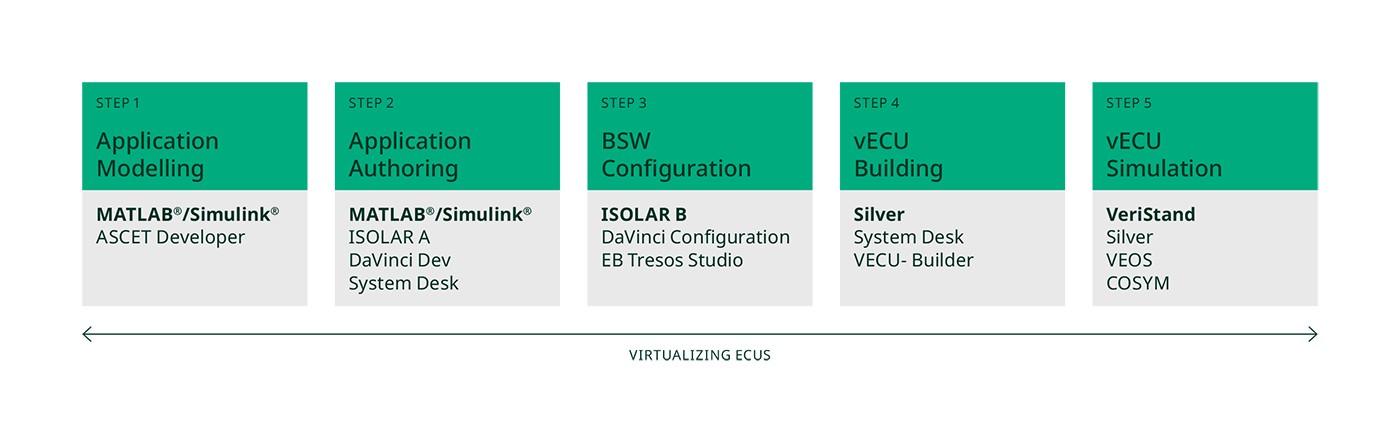
Abbildung 2: Virtueller Validierungsprozess
Indem wir diese genau definierten Schritte befolgen, können wir effektiv und effizient jede Funktionsweise der Fahrzeug-ECU simulieren und bieten ein leistungsstarkes Tool für die Entwicklung und das Testen von Automobilanwendungen, um Zeit zu sparen und den Testprozess zu einem frühen Zeitpunkt zu starten.